1.MOTOMAN handling robot
تفاصيل العمل

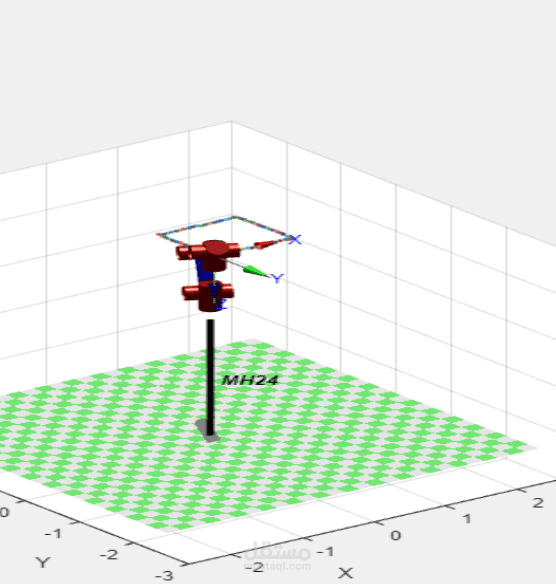
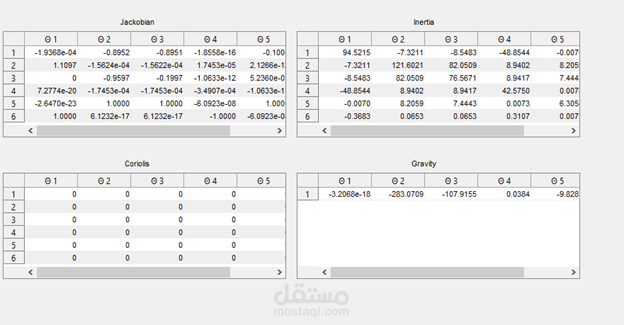
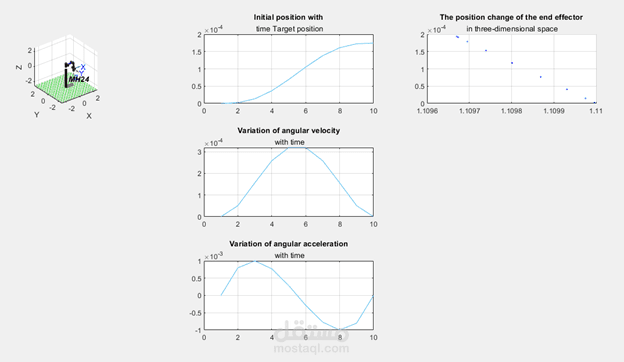
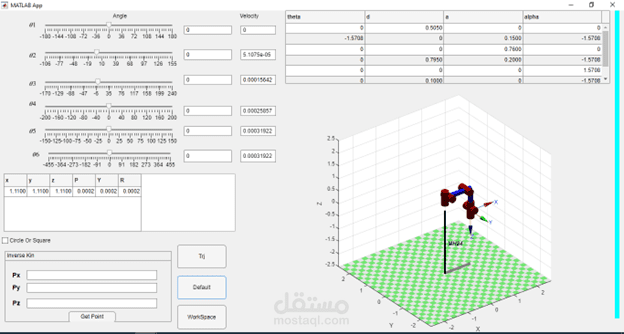
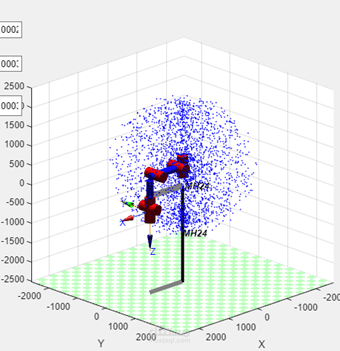
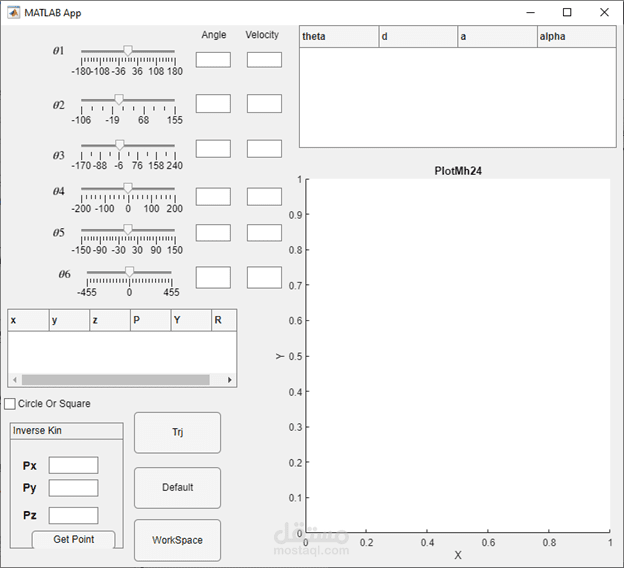
في أبحاث نمذجة ومحاكاة الروبوتات، يُعتبر نمذجة الروبوتات متعددة المفاصل بدقة أمرًا صعبًا بسبب تركيبها المعقد، لذلك يصعب على الروبوت عكس الحركة الفعلية في عملية محاكاة الحركة. لتحسين دقة محاكاة نموذج الروبوت متعدد المفاصل في محاكاة الحركة، تم اقتراح طريقة لإنشاء نموذج محاكاة ثلاثي الأبعاد باستخدام صندوق أدوات الروبوت وبرامج الرسم ثلاثية الأبعاد. تم أخذ روبوتات MH24 العالمية من ياسكاوا كهدف للبحث، وتم نمذجة وتحليل كل مفصل من هيكل الروبوت ومعلمات الوصلات، من أجل حل معادلة الكينماتيكا الأمامية والعكسية للروبوت. باستخدام برنامج SolidWorks، تم إنشاء نموذج ثلاثي الأبعاد لكل مفصل من مفاصل الروبوت. تم بناء نموذج المحاكاة ثلاثي الأبعاد لروبوت MH24 من خلال دمج النموذج ثلاثي الأبعاد لكل مفصل ونموذج معلمات دينفيت-هارتنبرغ (D-H) من خلال صندوق أدوات الروبوت. تم إكمال محاكاة القيادة الديناميكية لكل وصلة من وصلات الروبوت وتحليل محاكاة تخطيط مسار المؤثر النهائي. تم التحقق من دقة النمذجة ثلاثية الأبعاد من خلال معادلة الكينماتيكا الأمامية وقيمة مصفوفة الوضع للمؤثر النهائي للروبوت.