AUTONOMOUS CAR
تفاصيل العمل
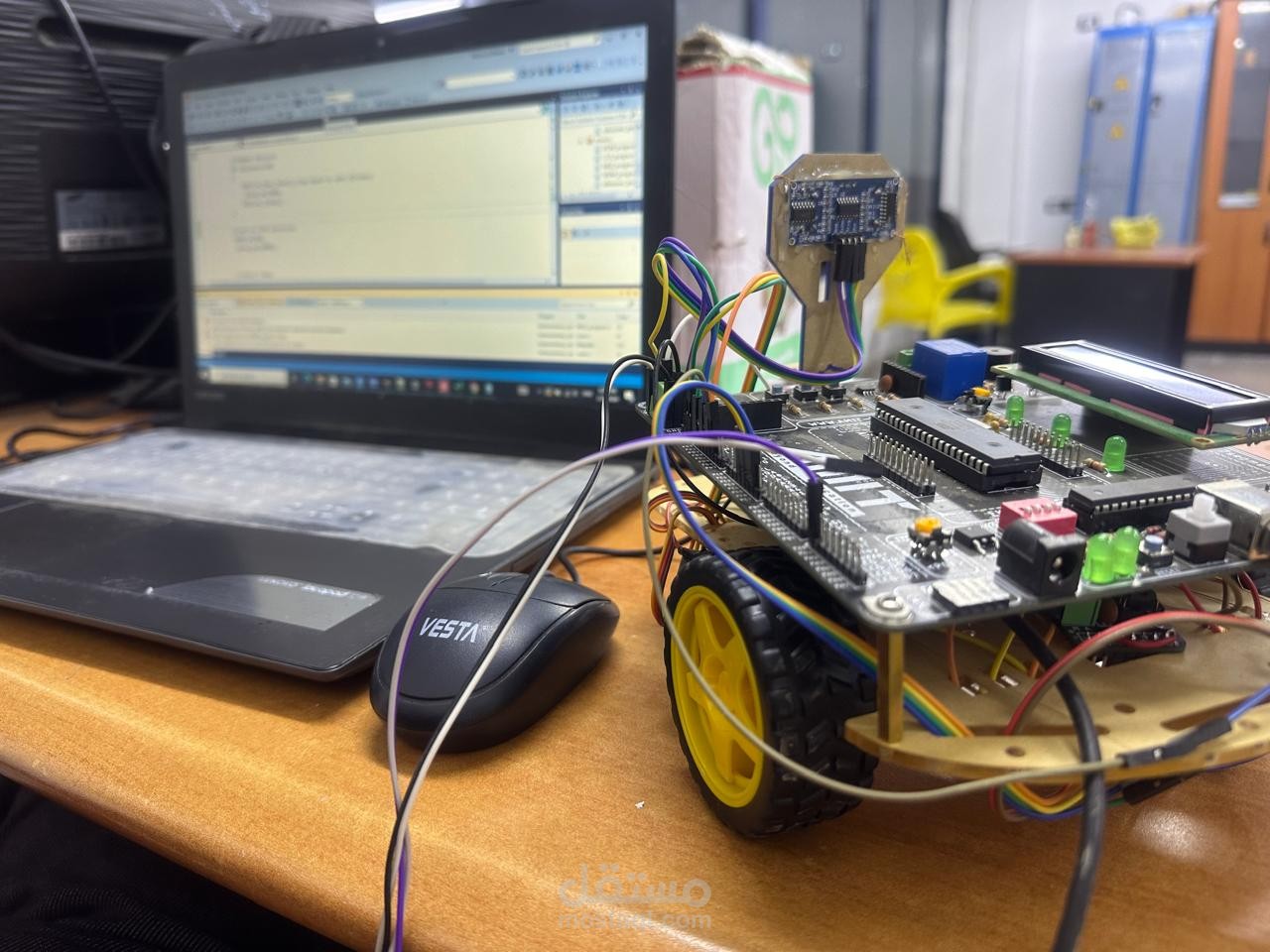
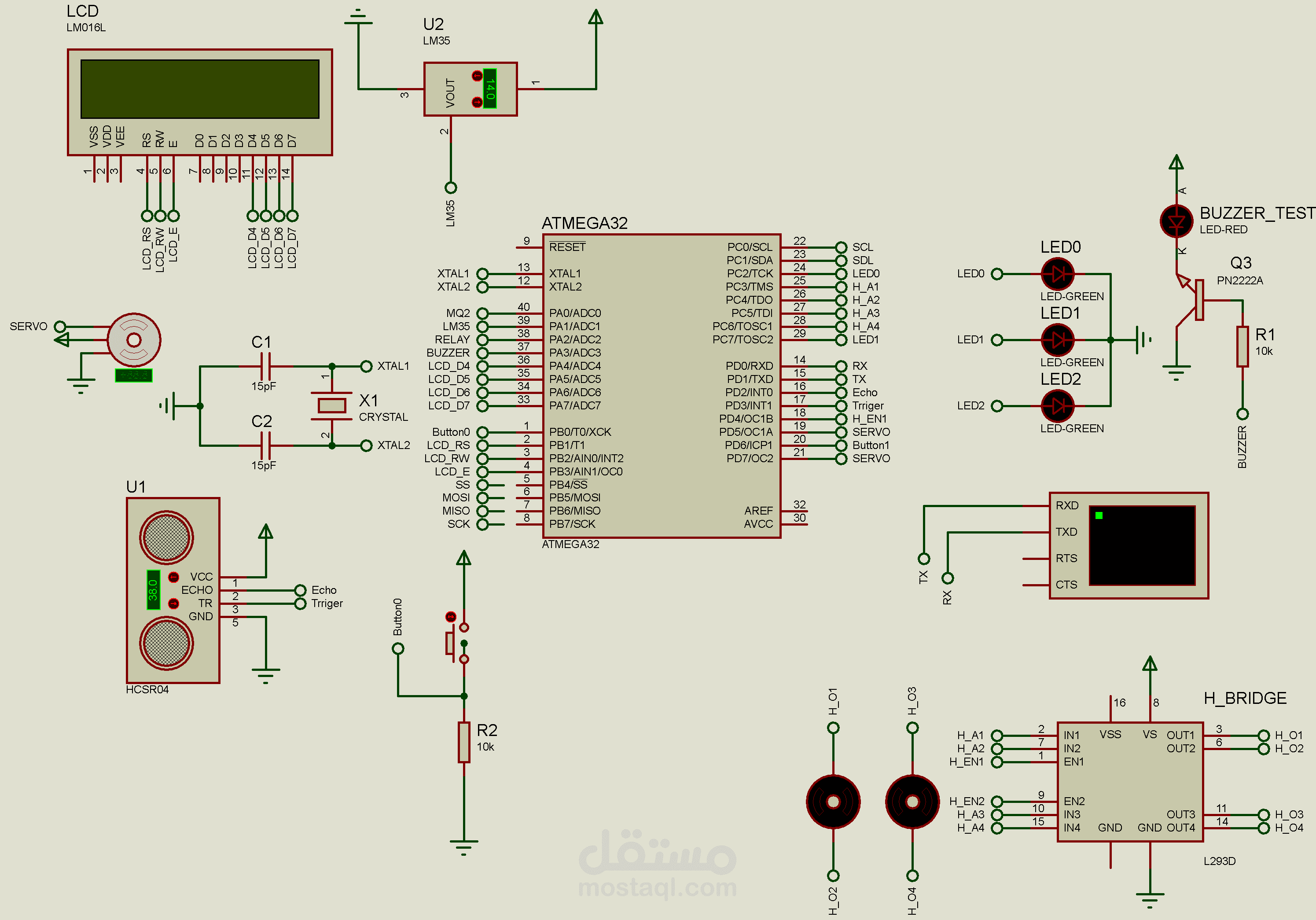
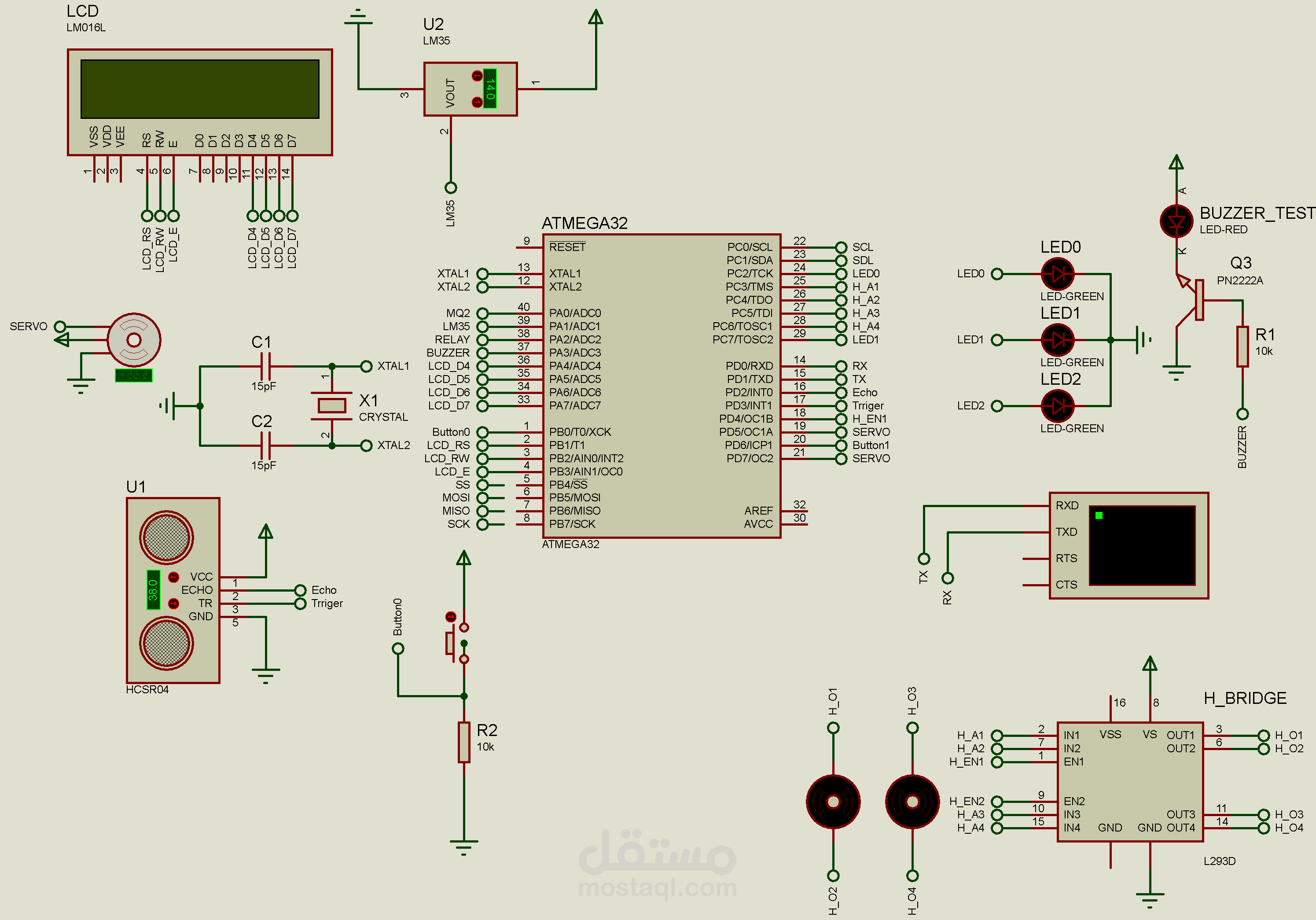
this project aims to implement a self-driving car using ATMEGA32 microchip programmed with high level language (C) that can avoid the obstacles with very fast response
ultrasonic is placed on servo motor axis , its function to defect the obstacles on the car way
if the car found an obstacle , it must change its way according to the ultrasonic data.