Remote operating vechile (ROV)
تفاصيل العمل
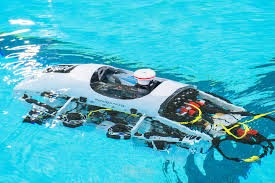
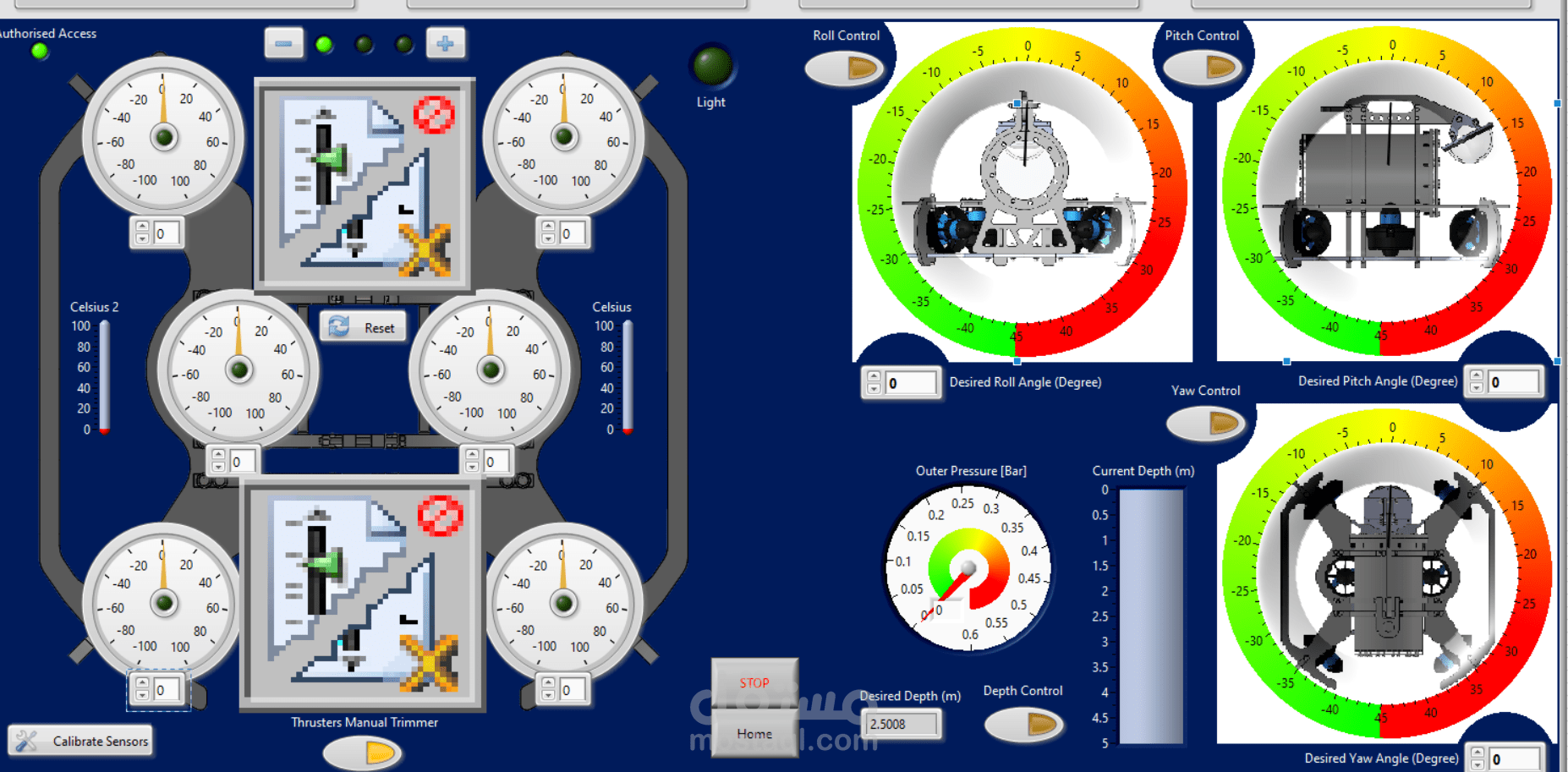
I have developed a desktop application using LabVIEW to Control a teathered ROV with gribers and fish eye camera controlled with MyRIO FPGA based on LabVIEW SW in RealTime operation.This ROV got six degree of freedom and its operation based on TCP/IP and UDP communication protocols to allow pilot to drive this ROV to do harch tasks under water.