تصميم نظام تحكم تعاوني للأذرع الروبوتية
تفاصيل العمل
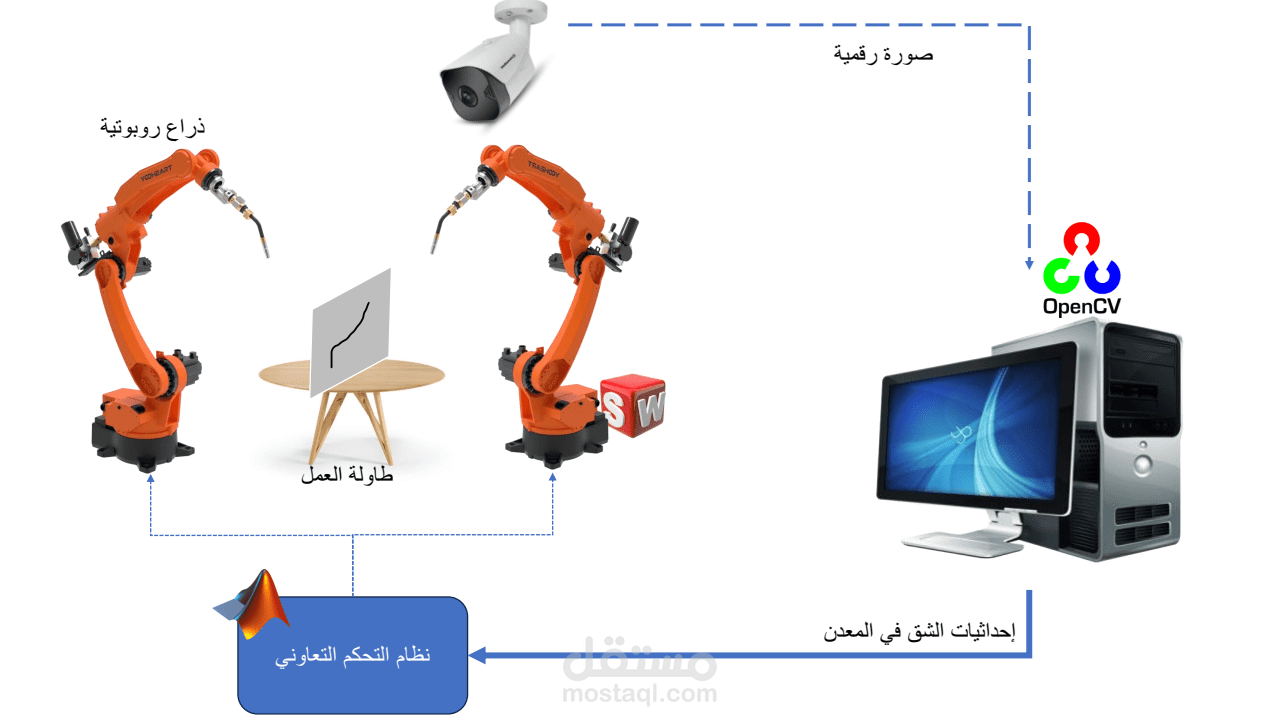
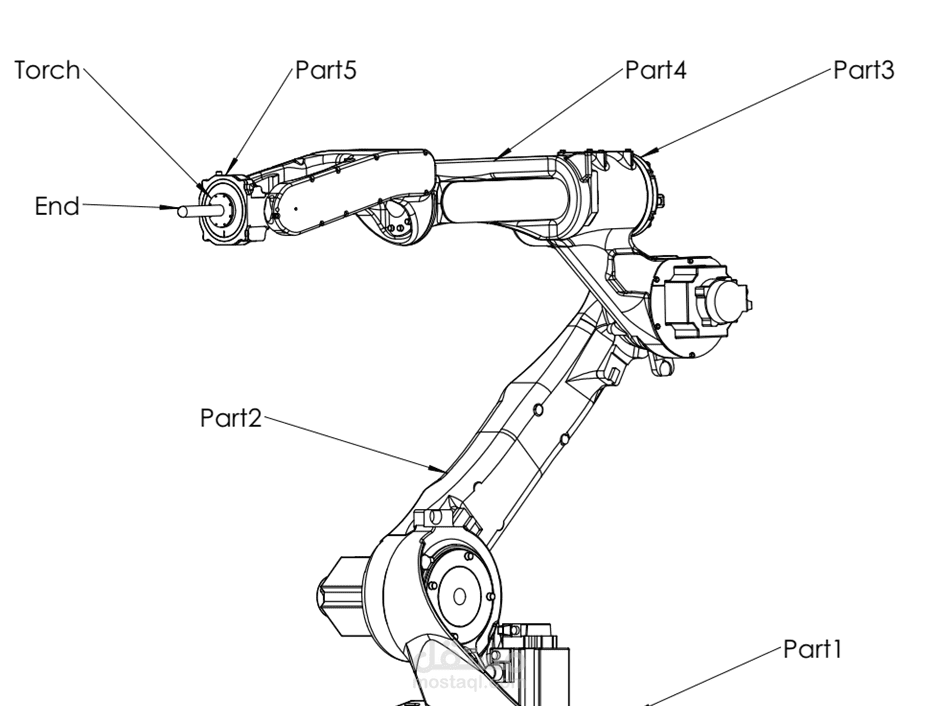
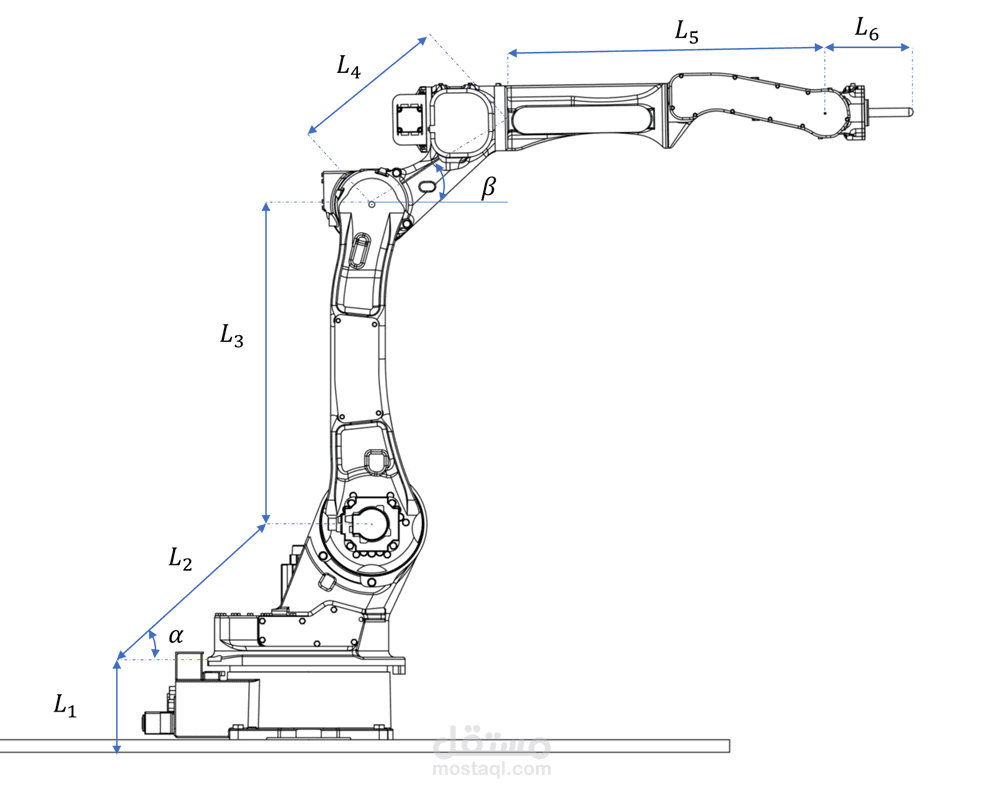
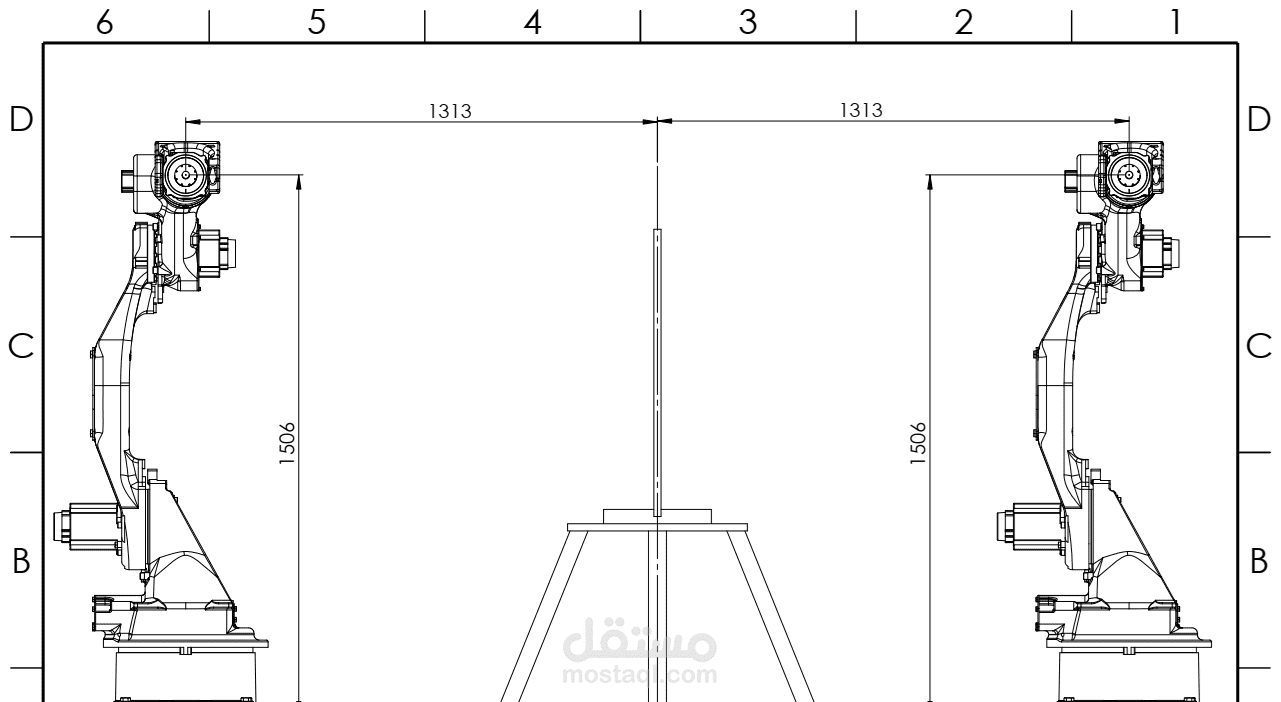
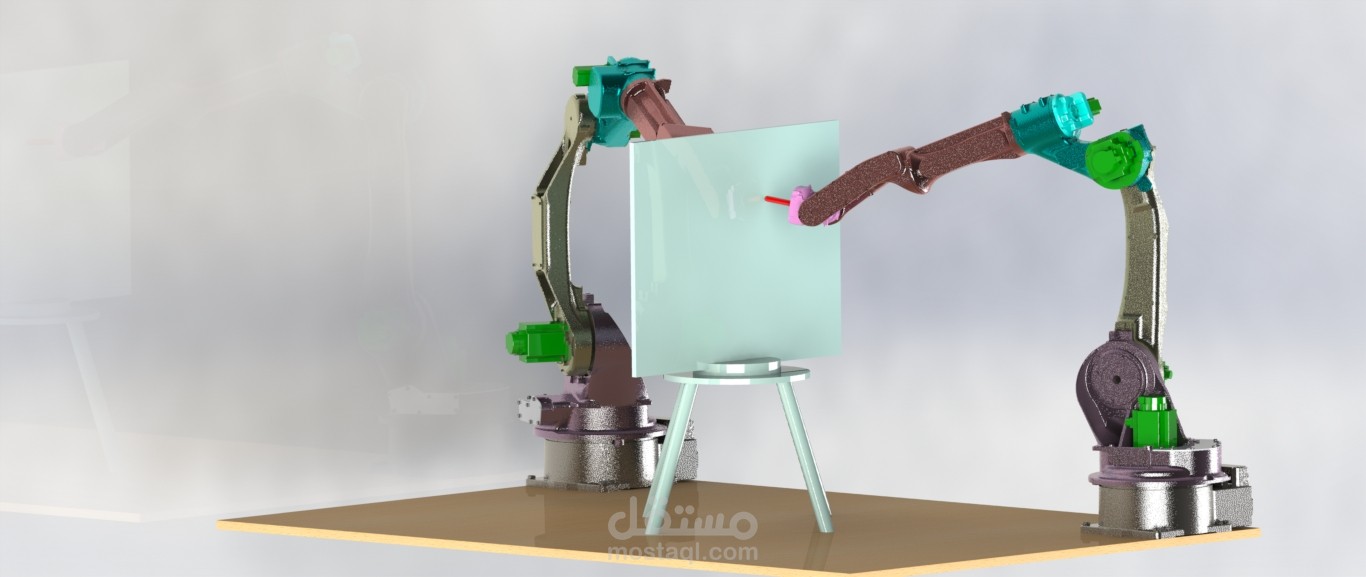
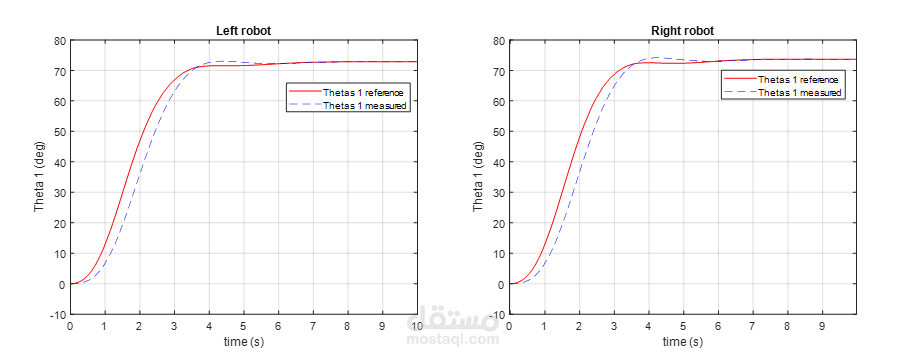
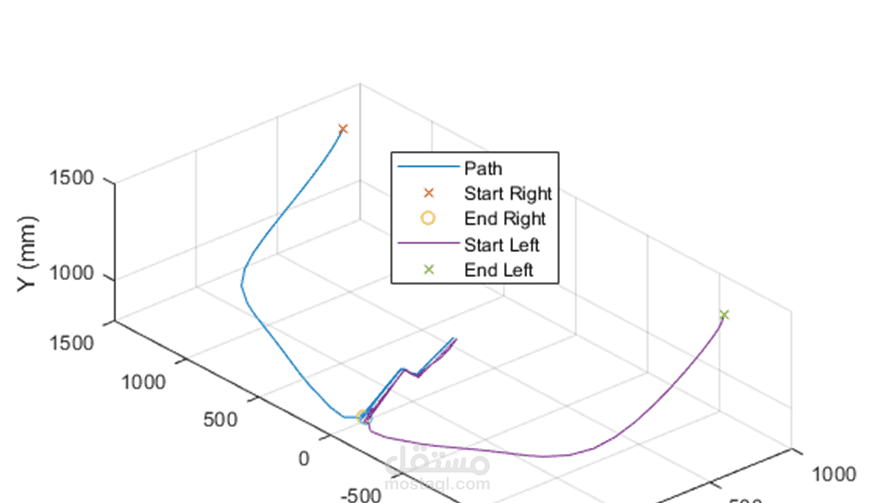
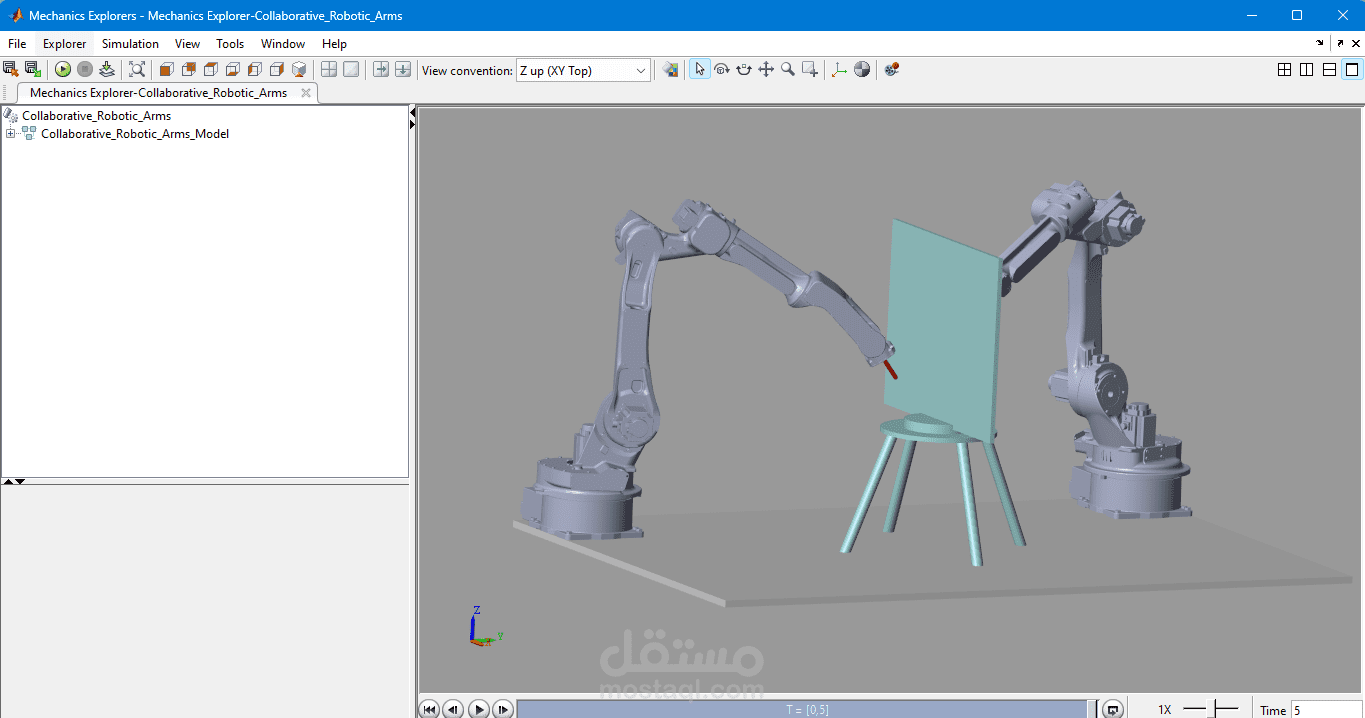
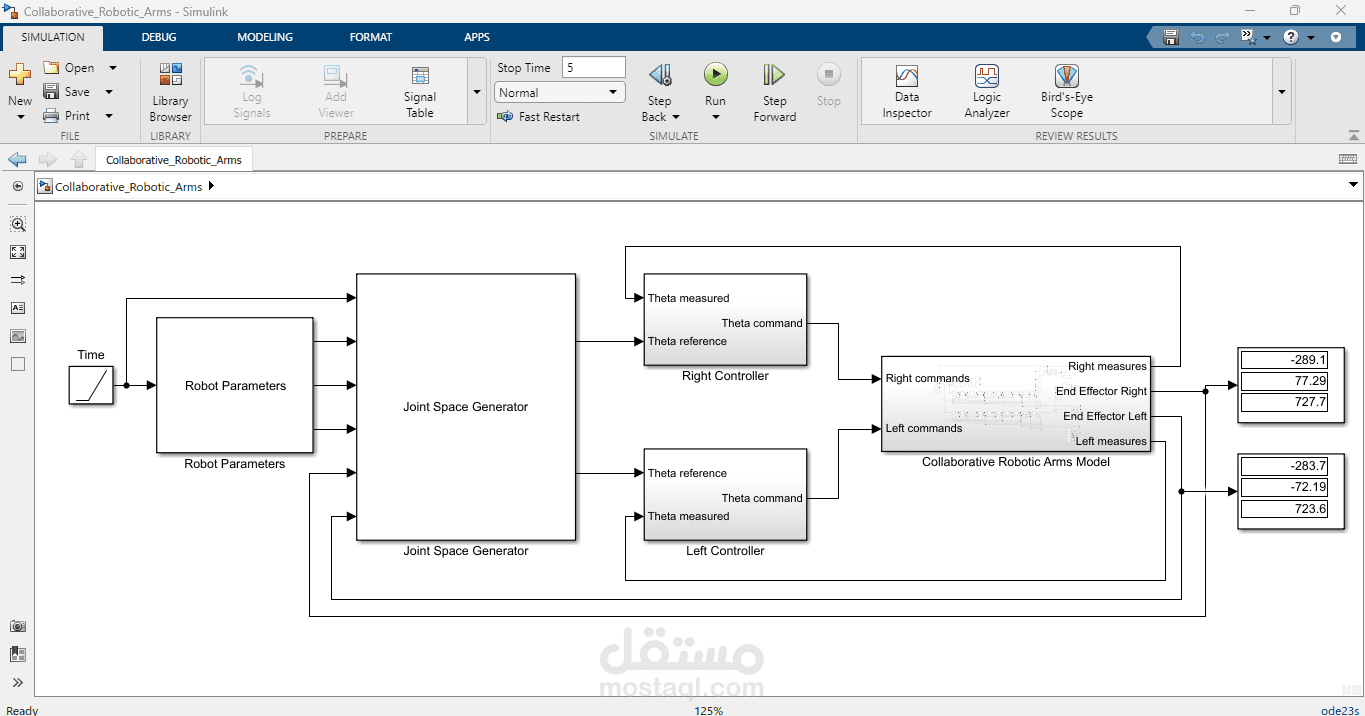
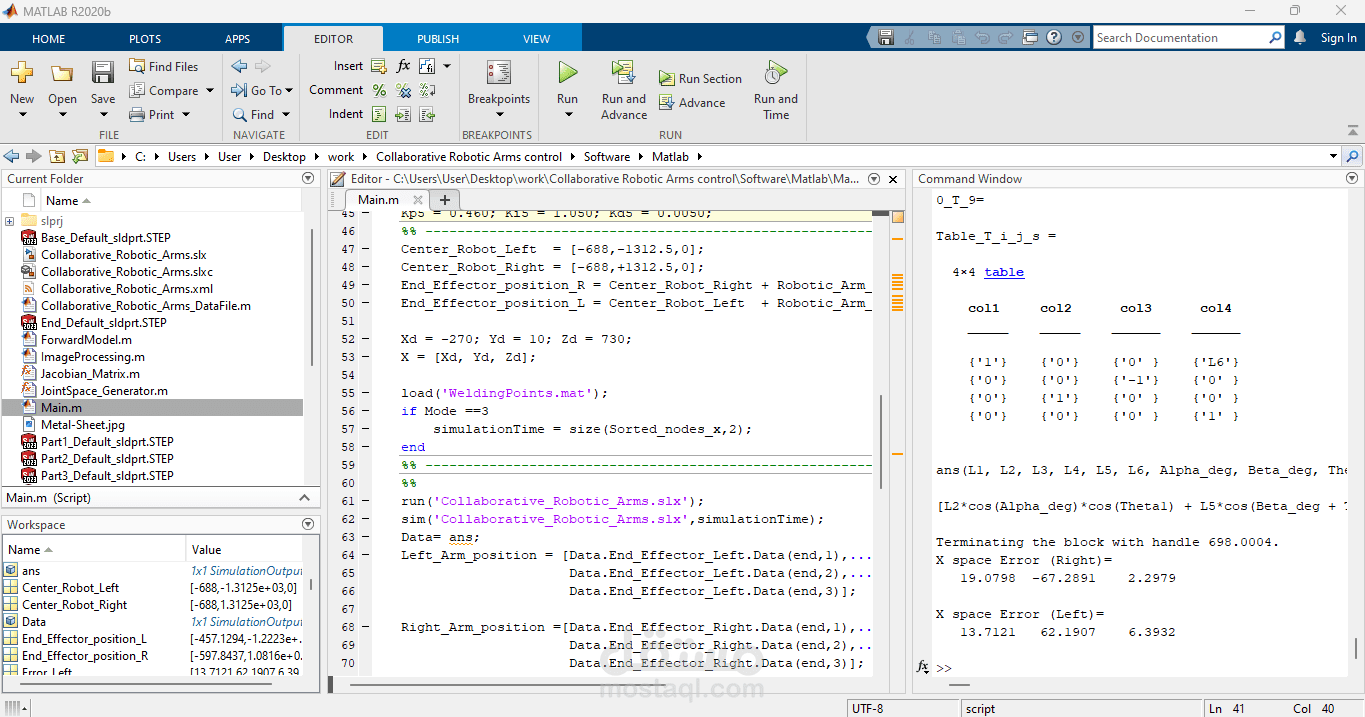
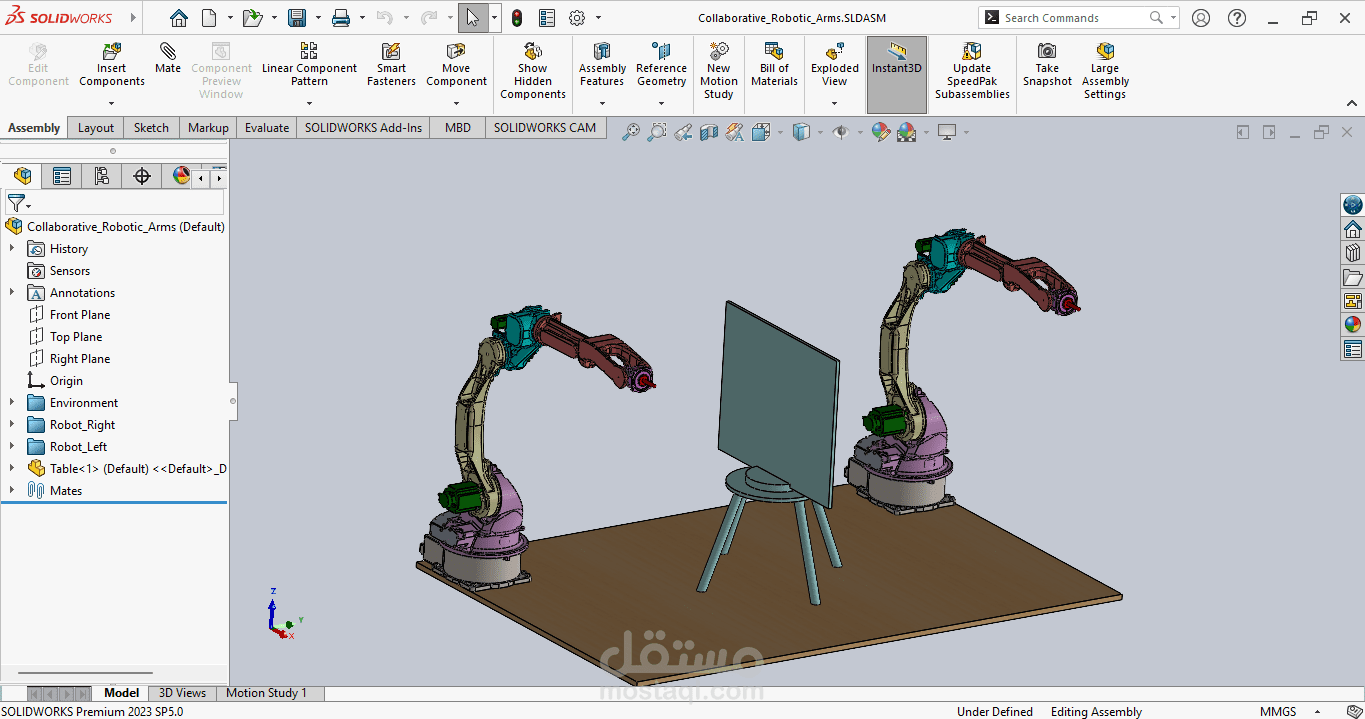
تصميم نموذج هندسي لذراع روبوتية بخمس درجات حرية بحيث يكون لها أبعاد حقيقية ومناسبة للاستخدام الصناعي، ومن ثم تصميم نظام تحكم تعاوني يقوم بالتنسيق بين ذراعين روبوتيتين في فضاء العمل.
تقوم الذراعين بتشكيل روبوت تعاوني يقوم بتأدية وظيفة مشتركة وهي محاكاة لحام قطع معدنية على شكل صفائح تحتوي على شقوق طولية يتم الكشف عنها من خلال نظام معالجة صورة.
ملفات مرفقة
بطاقة العمل
| اسم المستقل | إبراهيم س. |
| عدد الإعجابات | 0 |
| عدد المشاهدات | 4 |
| تاريخ الإضافة | |
| تاريخ الإنجاز |