Reinforcement Learning for Car Simulators
تفاصيل العمل
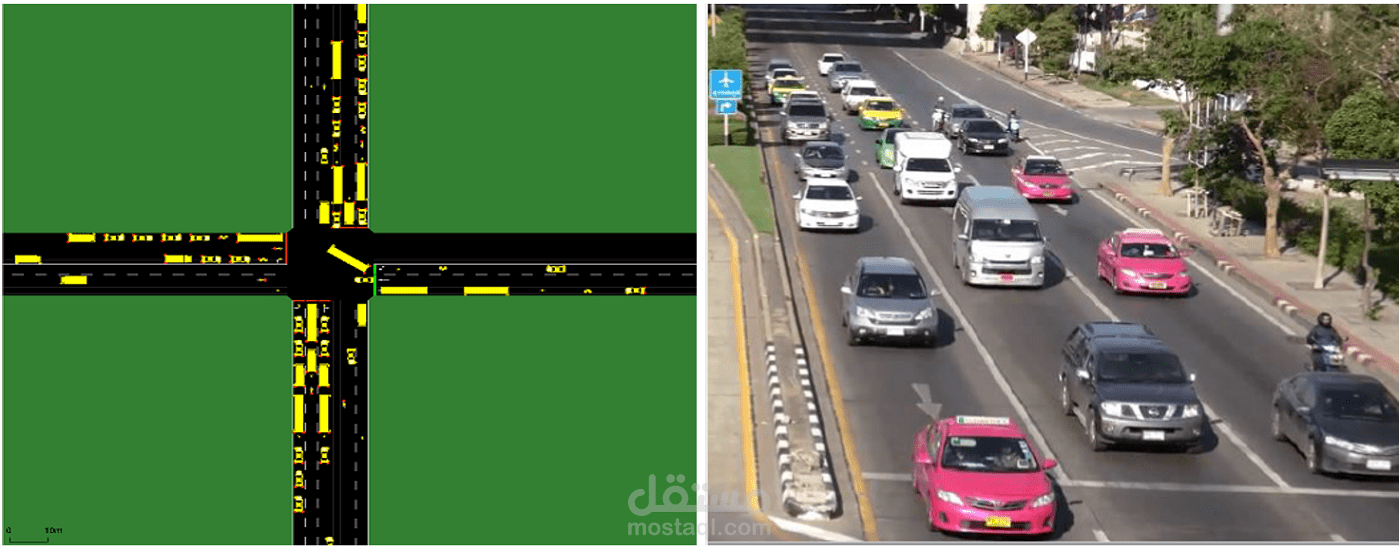
يركز هذا المشروع على تطوير خوارزمية التعلم التعزيزي لتدريب المركبات ذاتية القيادة في بيئات محاكاة. والهدف هو إنشاء وكلاء أذكياء يمكنهم تعلم القيادة من خلال التفاعل مع عالم افتراضي، ومحاكاة ظروف العالم الحقيقي. ستشمل بيئة محاكاة السيارة تحديات مختلفة مثل الظروف الجوية المختلفة، وأنواع الطرق، والعقبات، وسيناريوهات المرور، والبيئات الديناميكية لاختبار قدرة نماذج التعلم التعزيزي على التكيف.
سيستخدم المشروع تقنيات التعلم التعزيزي الحديثة، مثل التعلم العميق (DQN)، أو تحسين السياسة التقريبية (PPO)، أو التدرج العميق للسياسة الحتمية (DDPG)، لتمكين الوكيل من اتخاذ قرارات متسلسلة، وتحسين استراتيجيات القيادة، وتعزيز السلامة والكفاءة. سيتعلم الوكيل من خلال التجربة والخطأ، ويتلقى ردود الفعل من تفاعلاته في البيئة، بهدف تقليل الاصطدامات، وتحسين كفاءة الوقود، وضمان التنقل السلس.
سيعمل جهاز المحاكاة كأرض تدريب لتطوير الخوارزميات التي يمكن نقلها إلى تطبيقات القيادة الذاتية في العالم الحقيقي. سيتم استخدام مؤشرات الأداء الرئيسية مثل الوقت المستغرق للوصول إلى الوجهة، وعدد الاصطدامات، والسرعة المتوسطة، والالتزام بقوانين المرور لقياس أداء العميل. يهدف المشروع إلى سد الفجوة بين التعلم القائم على المحاكاة والتطبيق في العالم الحقيقي، وتوفير نهج قابل للتطوير لتدريب خوارزميات السيارات ذاتية القيادة.