robotic-arm-manipulator
تفاصيل العمل
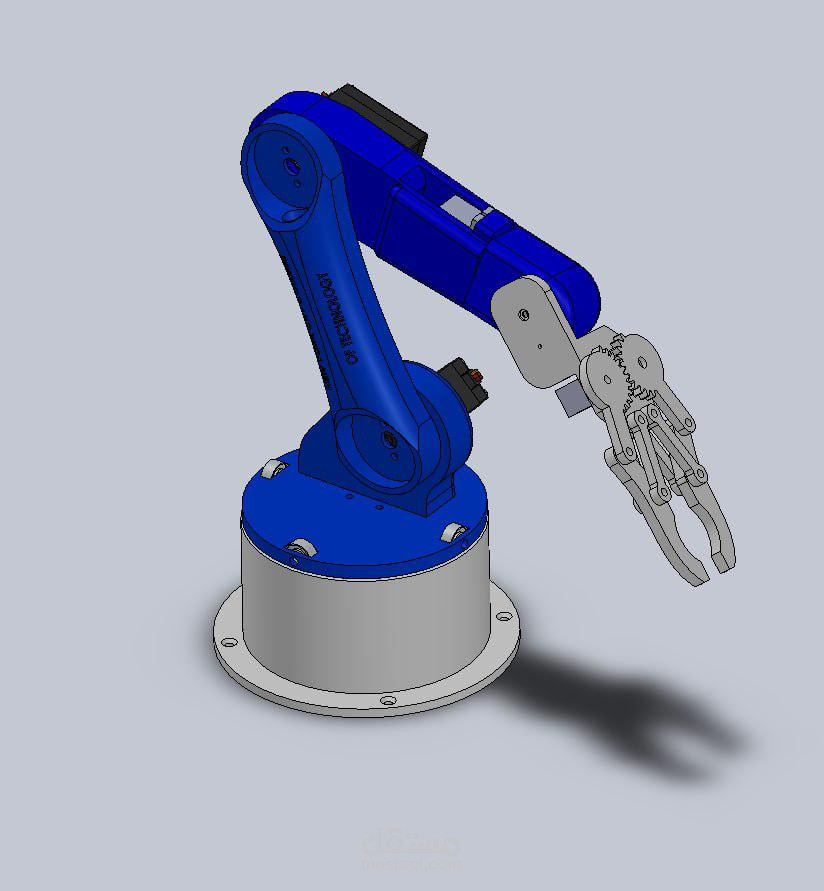
المشروع: pick -and- place Robotic Arm Manipulator
تصميم وتطوير ذراع روبوتية تقوم بمهام الالتقاط والتثبيت باستخدام ذراع متحركة.
تم تصميم الذراع لالتقاط مكعب ووضعه في كوب، ويظهر المشروع الدمج بين تصميم ميكانيكي متقن وحسابات الحركة (Kinematics) وبرمجة التحكم.
التكنولوجيا المستخدمة : تصميم ميكانيكي Solidworks | برمجة التحكم Arduino | محاكاة Proteous, Solidworks
الهدف: استعراض كيفية تصميم ذراع روبوتية قادرة على تنفيذ مهام دقيقة بالتكامل بين تصميم الآلة والبرمجة، حيث تعمل كذراع خط انتاج علي مصنع بكفائة عالية.