Autonomous Car
تفاصيل العمل
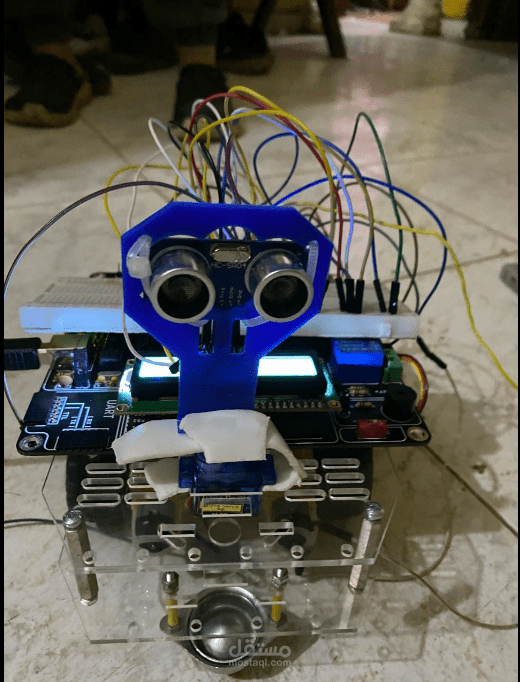
قمت بتصميم وتنفيذ نظام قيادة ذاتية باستخدام متحكم Atmega32، مع دمج أجهزة استشعار الموجات فوق الصوتية (HC-SR04) لاكتشاف العقبات في الوقت الفعلي، ومحركات سيرفو للتحكم في التوجيه.
طورت خوارزميات بلغة C المدمجة لمعالجة بيانات أجهزة الاستشعار، مما مكّن السيارة من قياس المسافات بدقة أقل من 5 سم وتجنب الاصطدامات بكفاءة.
برمجة محركات DC (مشغل L298N) لتحقيق تسارع/تباطؤ سلس، مع تعديل المسار تلقائياً بناءً على قراءات أجهزة الاستشعار.
نجاح النظام في التنقل الذاتي مع تفادي العقبات بدقة عالية.
تطوير حل منخفض التكلفة قابل للتطوير في أنظمة الملاحة الذاتية.