garbage collector robot based on single monocular camera
تفاصيل العمل
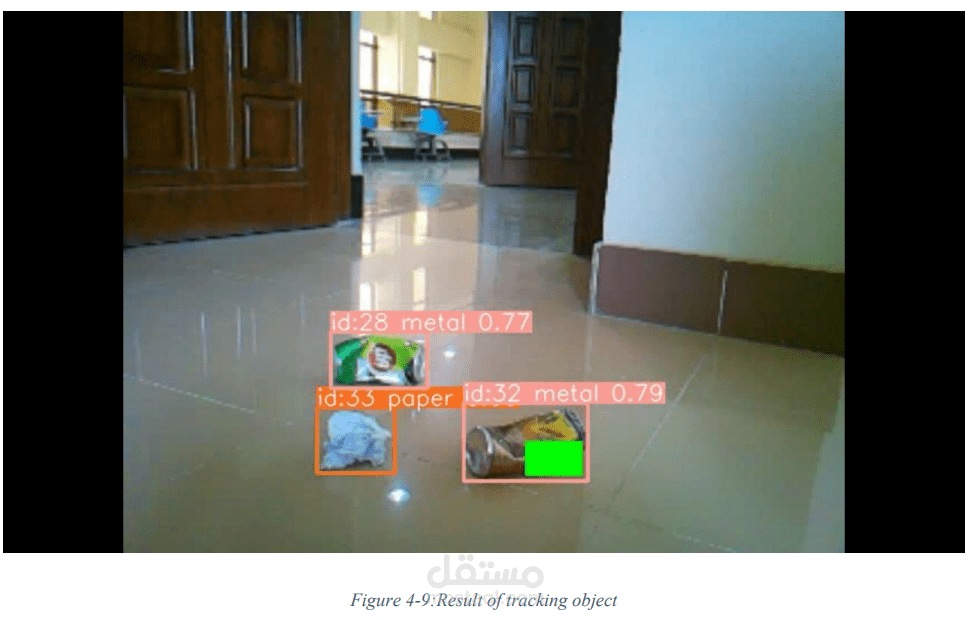
لقد قمت بعمل garbage collector robot based on single monocular camera عن طريق توقع الطريق الصحيح باستخدام depth estimation neural network model
واستخدام موديل اياضا لتحديد القمامة والاتجاه لجمعها مع وجود desktop application لمتابعة حركة الروبوت