نظام IOT لتوصيل طلبات باستخدام سيارة مصممة بالاعتماد على إنترنت الأشياء
تفاصيل العمل
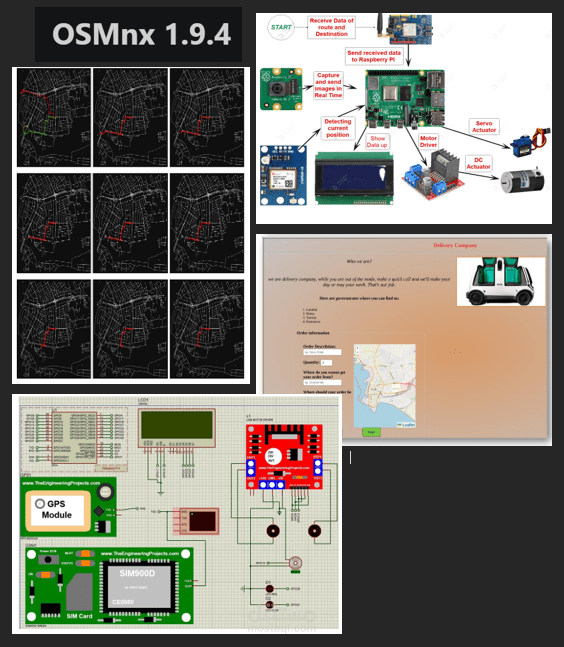
النموذج النهائي هو نموذج عام لسيارة ذاتية القيادة تنتقل عبر مسار محدد باستخدام حساس الموقع وأوامر التحكم الصادرة عن السيرفر وأوامر التوجيه المضمنة مع وحدة التحكم Raspberry Pi بالاعتماد على بيانات الموقع والبيئة المحيطة بالسيارة. في هذا النظام يتم تحديد تخطيط المسار بمساعدة المخدم المسؤول عن توصيل الطلبات وتلبية العملاء ومن ثم تحديد الاتجاهات حسب المسار المتخذ من قبل وحدة التحكم Raspberry Pi التي تتخذ قرارات مهمة مثل اختيار الاتجاه الذي تتحرك فيه السيارة والتحقق من وجود عوائق إن وجدت. بالإضافة إلى ذلك، تستخدم السيارة أجهزة استشعار إضافية أخرى للمساعدة في زيادة الدقة في اكتشاف العوائق.
ملفات مرفقة
بطاقة العمل
| اسم المستقل | Muhammad J. |
| عدد الإعجابات | 0 |
| عدد المشاهدات | 7 |
| تاريخ الإضافة | |
| تاريخ الإنجاز |