روبوت لفحص الهياكل السفلية
تفاصيل العمل
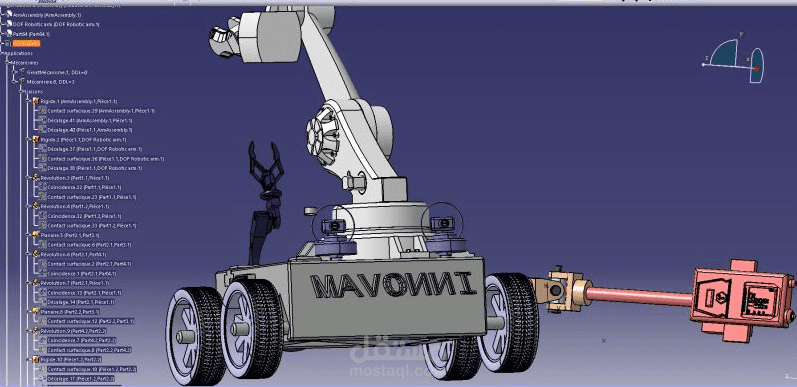
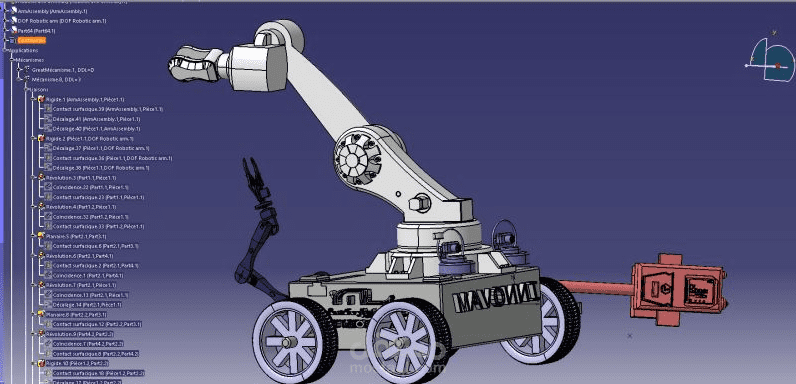
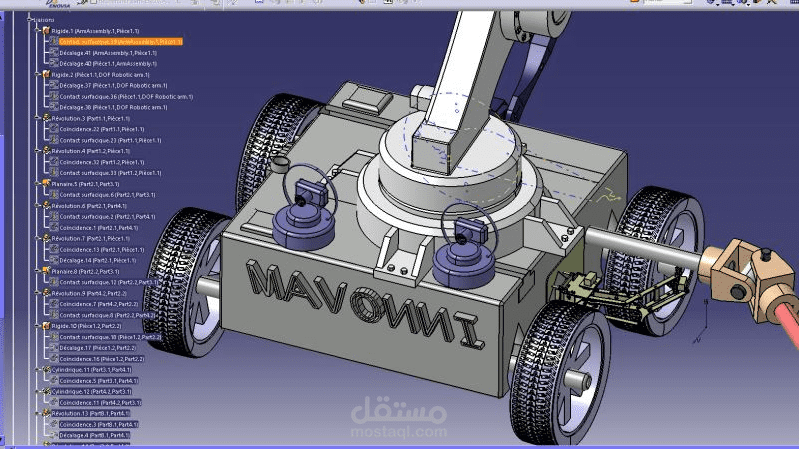
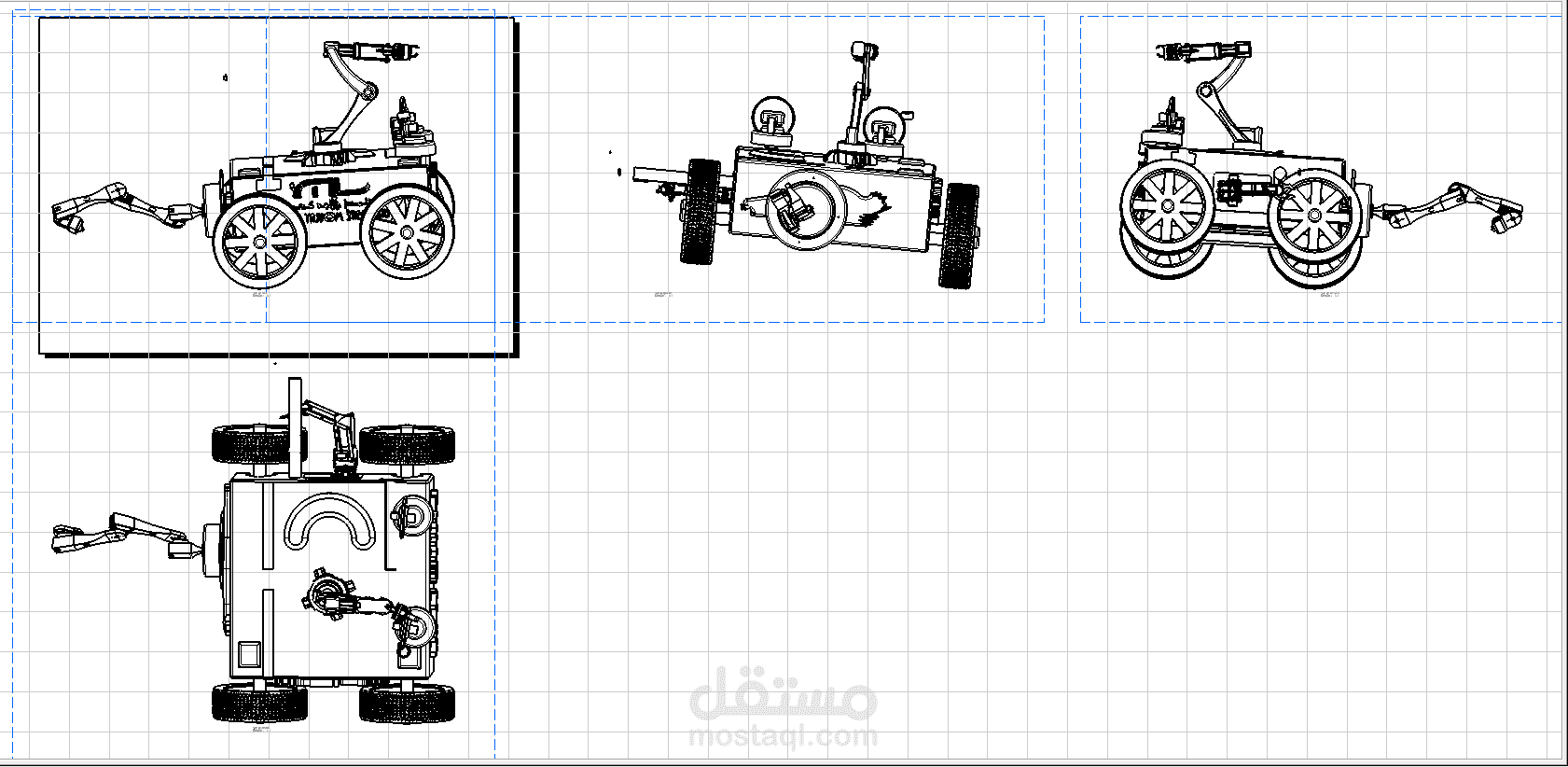
في هذا المشروع، قمت بتصميم وتطوير روبوت متخصص لفحص الهياكل من الأسفل، مع التركيز على تفاصيل كل جزء لضمان المتانة والكفاءة. بدأت بإنشاء نموذج ثلاثي الأبعاد دقيق للروبوت باستخدام برنامج CATIA V5. الهيكل الرئيسي للروبوت مصنوع من الألومنيوم المقوى، وهو مادة خفيفة الوزن لكنها مقاومة للصدمات والتآكل، مما يوفر للروبوت القدرة على العمل في بيئات قاسية.
نظام الحركة يتكون من أربعة عجلات مصنوعة من البولي يوريثان، وهي مادة معروفة بمقاومتها للتآكل ومرونتها، مما يتيح للروبوت التنقل بسلاسة تحت الهياكل الضيقة. قمت بتصميم آلية حركة متطورة تتيح للروبوت الدوران والتوجيه بدقة عالية، مما يسهل عليه الوصول إلى جميع الزوايا.
في النظام الكهربائي، قمت بدمج كاميرا عالية الدقة موضوعة في مقدمة الروبوت، محمية بغلاف من الزجاج المقاوم للخدش. التحكم الإلكتروني يتم عبر لوحة دوائر مطبوعة (PCB) صممتها خصيصًا لتناسب متطلبات المشروع، مع نظام تبريد متكامل للحفاظ على الأداء في ظروف التشغيل المستمرة.
لضمان موثوقية الروبوت، أجريت سلسلة من اختبارات المحاكاة باستخدام أدوات التحليل المتقدمة. هذه الاختبارات شملت تقييم أداء الروبوت في مختلف ظروف التشغيل، مثل درجات الحرارة العالية والرطوبة، والتحقق من قدرته على تحمل الاهتزازات والصدمات.
في النهاية، قمت بتجميع جميع الأجزاء وتجهيز ملفات التصنيع باستخدام تقنيات التصنيع الدقيق، مما أدى إلى إنتاج روبوت متين وموثوق به، قادر على فحص كافة النقاط تحت الهياكل بكفاءة وفعالية.
بطاقة العمل
| اسم المستقل | أيمن ا. |
| عدد الإعجابات | 0 |
| عدد المشاهدات | 7 |
| تاريخ الإضافة | |
| تاريخ الإنجاز |