روبوت توصيل ذاتي التوازن باستخدام نظام تشغيل الروبوتات
تفاصيل العمل
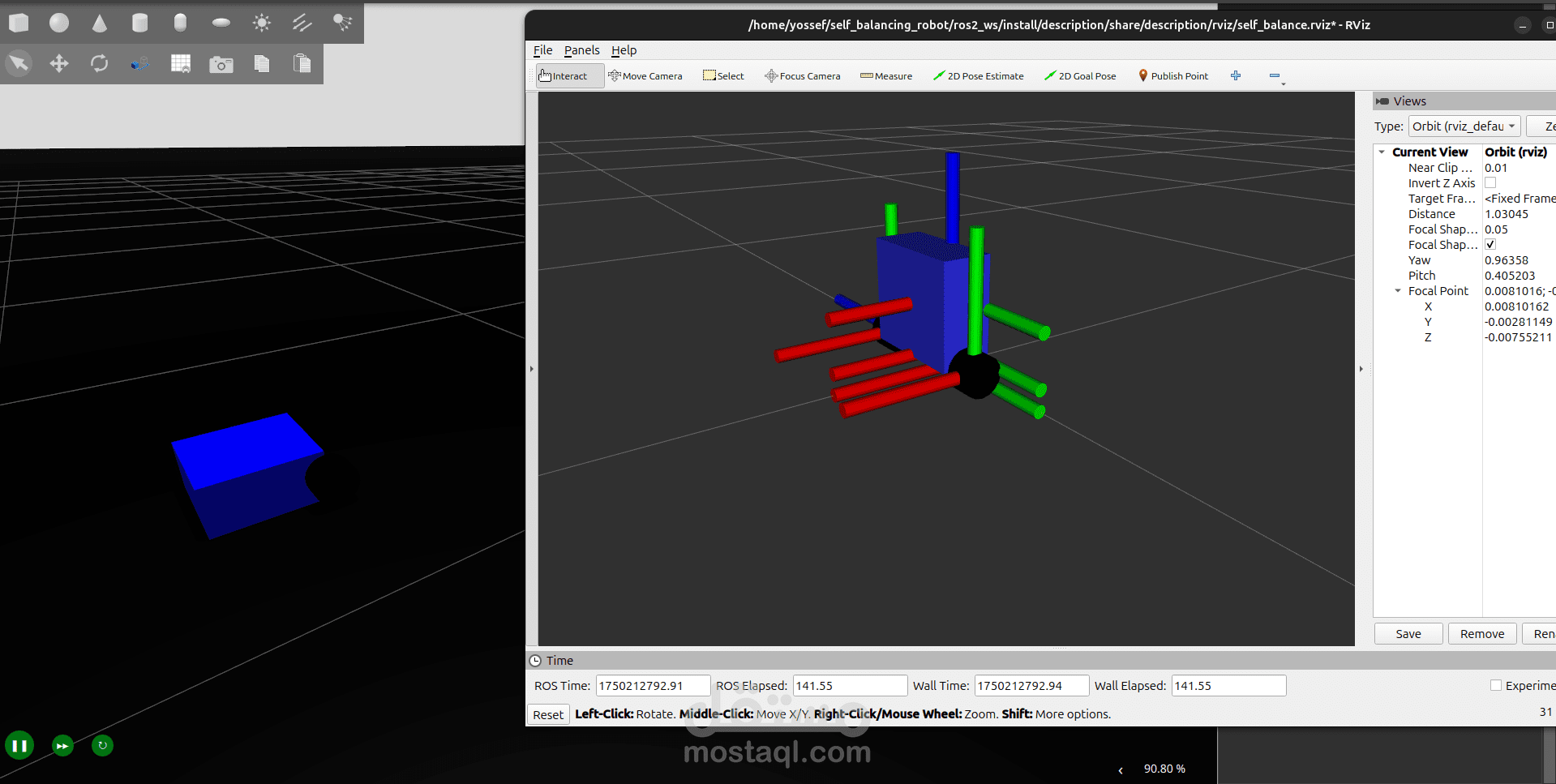
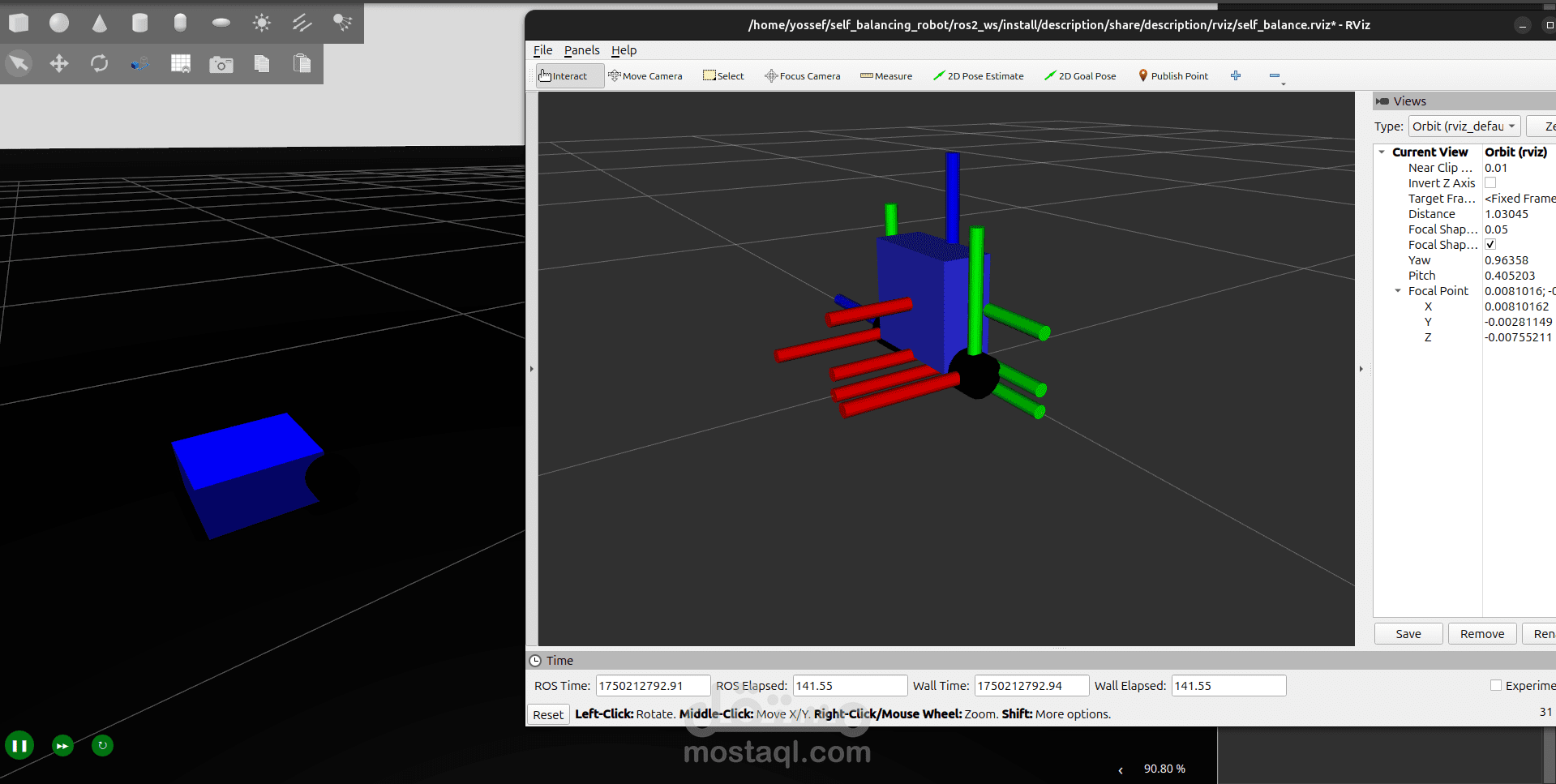
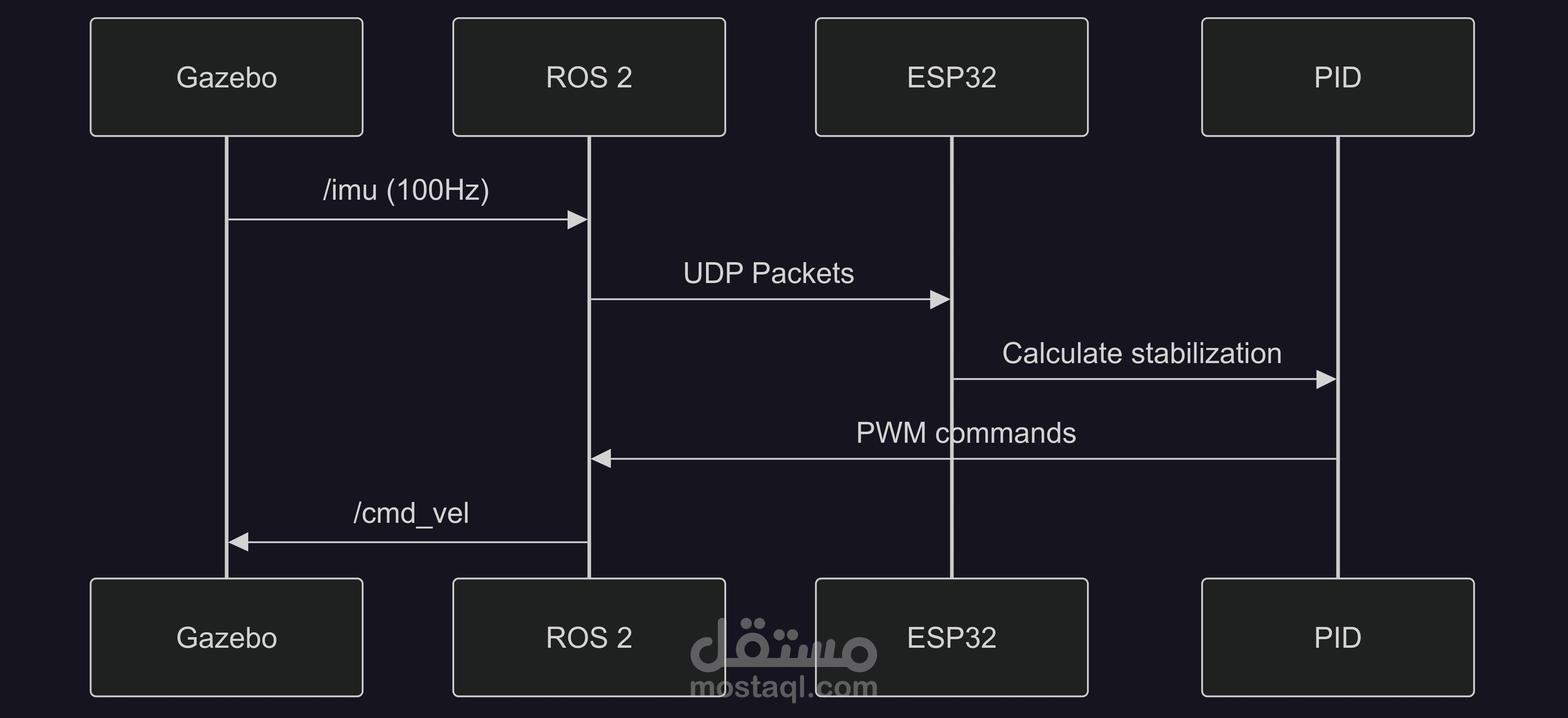
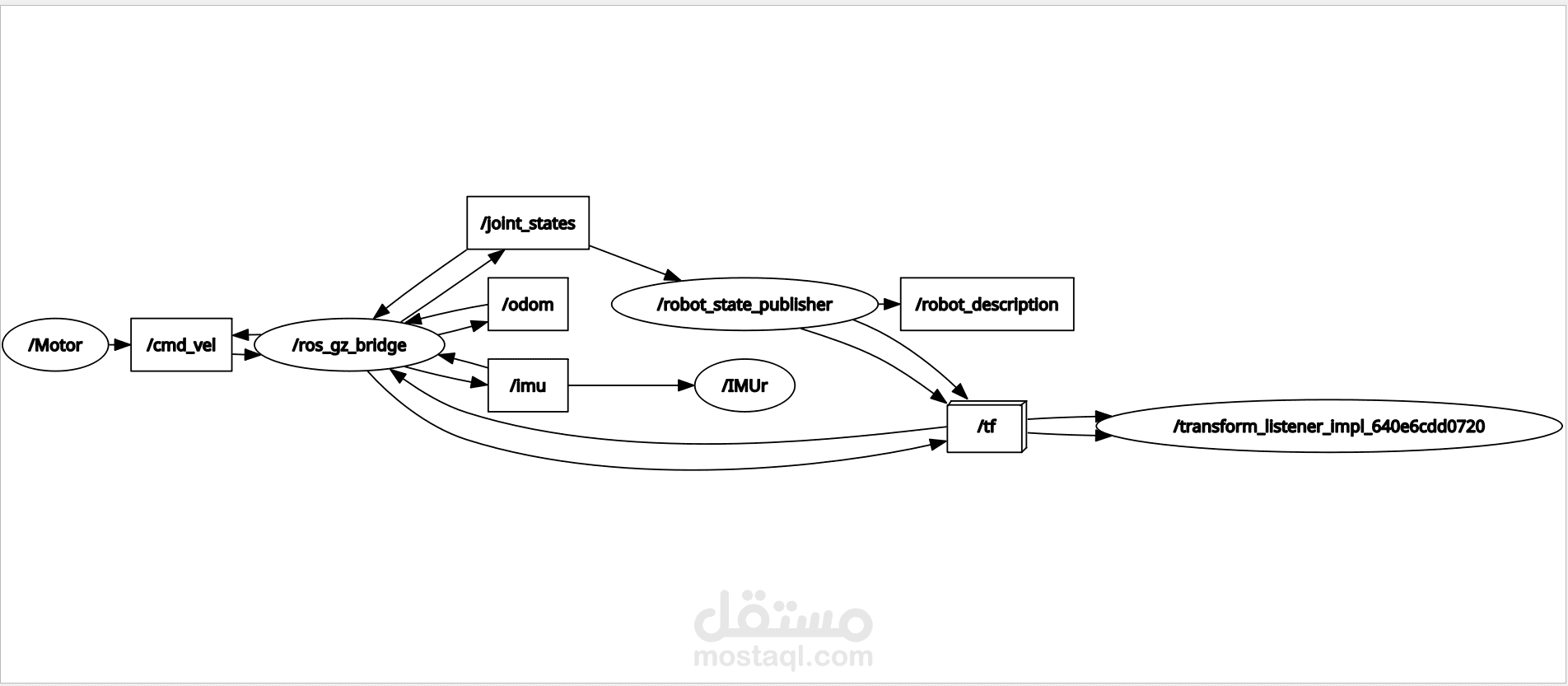
روبوت متقدم ذو عجلتين قادر على الحفاظ على توازنه أثناء الحركة باستخدام تحكم PID وبيانات IMU. النظام يعتمد على ESP32 كمتعامل منخفض المستوى لإدارة المحركات والحساسات، ويتواصل مع حاسوب شخصي يعمل بـ ROS 2 Jazzy عبر Wi-Fi. تم تطوير محاكاة كاملة باستخدام Gazebo وURDF مع Nav2 للتنقل، إضافةً إلى ربط مباشر بين المحاكاة والكود التشغيلي في ESP32. تم تصميم الكود بهيكلية معيارية قابلة للتوسعة باستخدام موديولات منفصلة (UDP Server، Velocity Parser، Shared Data Module).