الرئيسية
المستقلين
Johnny S.
معرض الأعمال
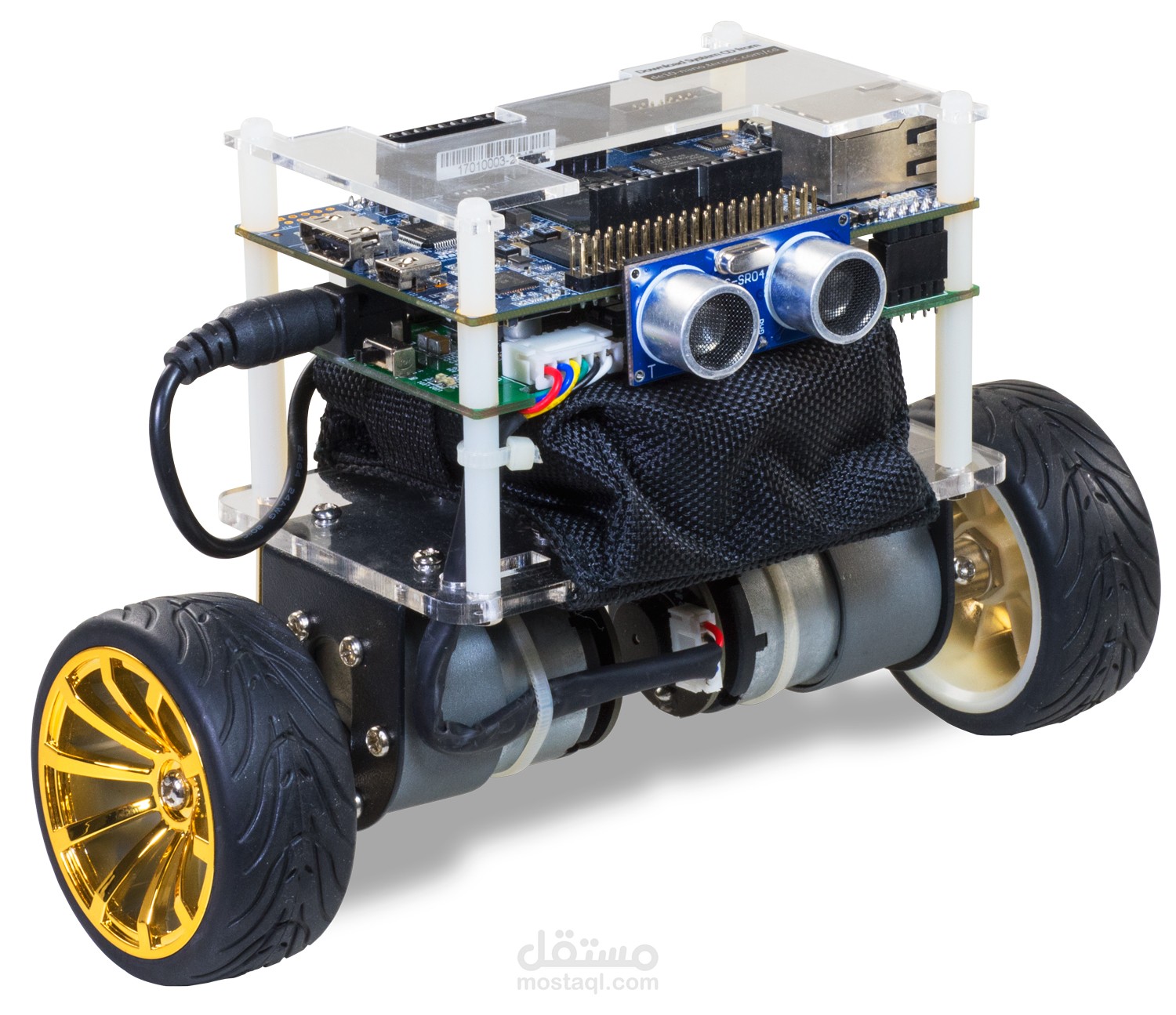
implement balancing robot
معرض الأعمال
اطلب عمل مماثل
تفاصيل العمل
use PID for implement balancing robot
بطاقة العمل
اسم المستقل
Johnny S.
عدد الإعجابات
0
تاريخ الإضافة
14/05/2024
×