German international university (GIU)
تفاصيل العمل
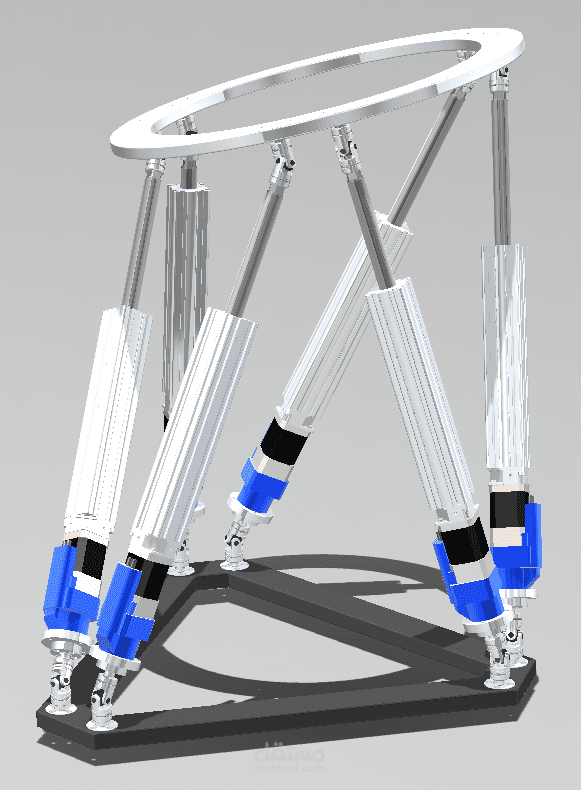
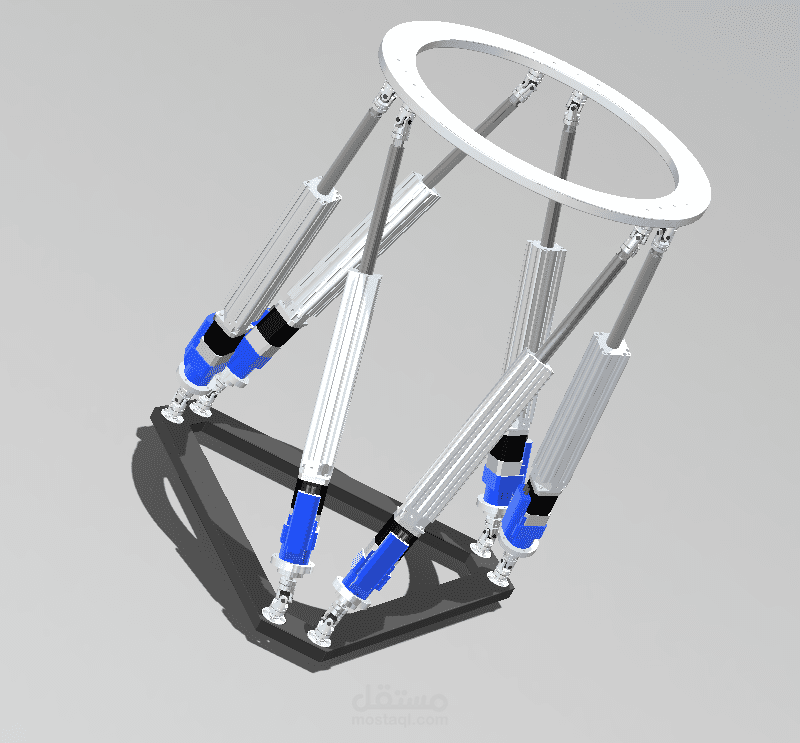
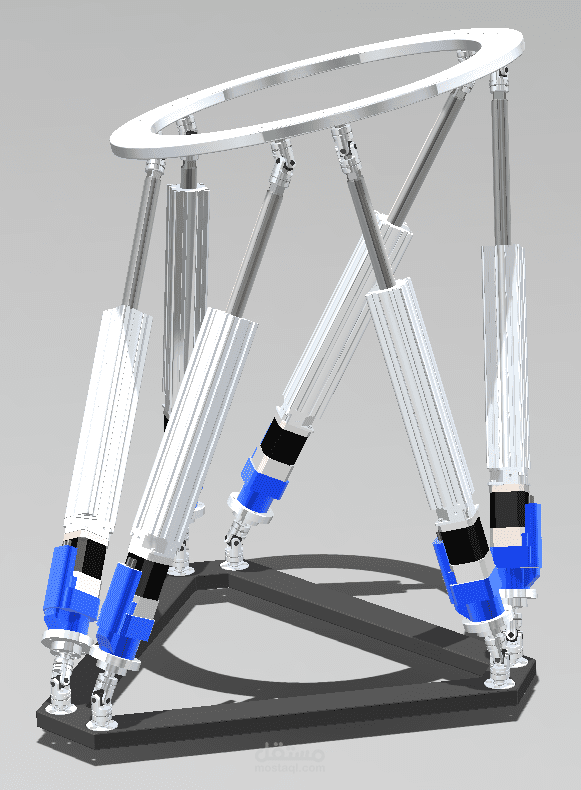
This a parallel robot which is called stewart gough platform which uses 6 linear actuators each motor can lift up to 55 Kg and each linear actuator is linked by 2 universal joints on in each side of the motor , this project is mainly used to balancing things on planes or chips for avoiding many things such as leakage , it works by moving the lower platform only the the motors ensure the upper platform is stable .