German international university (GIU)
تفاصيل العمل

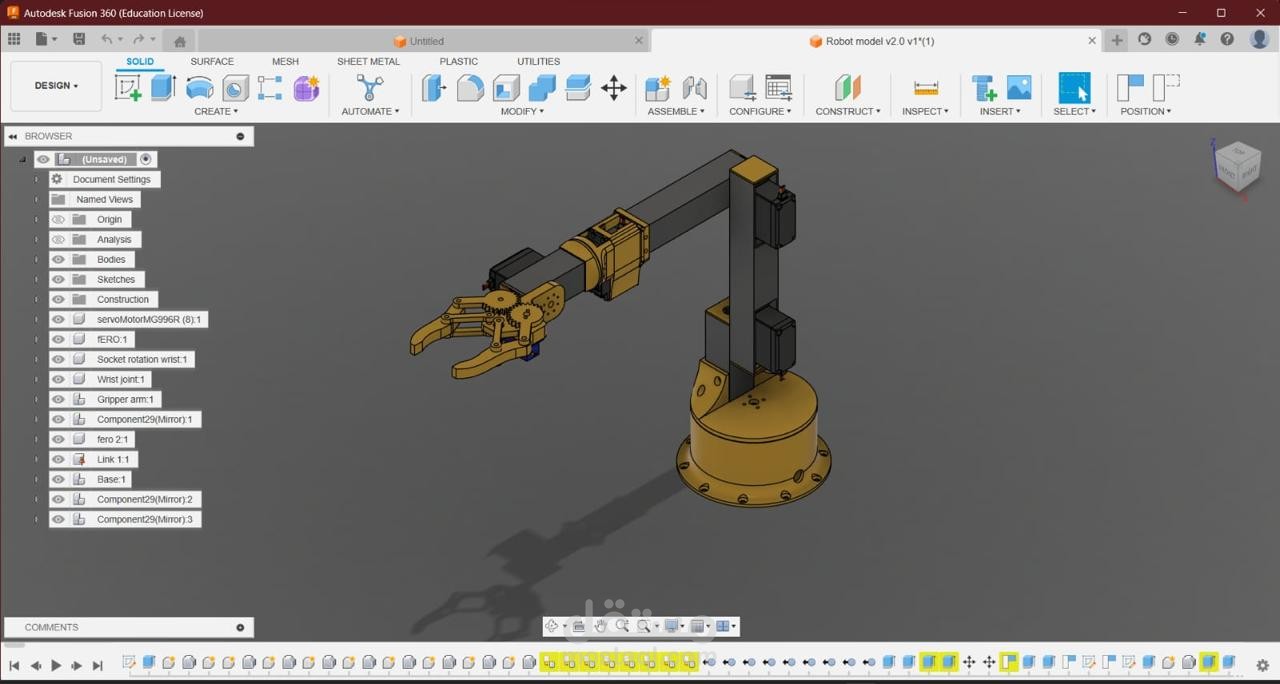
A linear robot with 5 degrees of freedom and a gripper end-effector using backlash mechanism and servo motors connected to a touch screen for choosing on of two mods , manual usage using joysticks , automatics usage using coordinates that will be entered using the touch screen .
ملفات مرفقة
بطاقة العمل
| اسم المستقل | Beshoy K. |
| عدد الإعجابات | 0 |
| عدد المشاهدات | 9 |
| تاريخ الإضافة | |
| تاريخ الإنجاز |