Ball balancing using pid controller
تفاصيل العمل
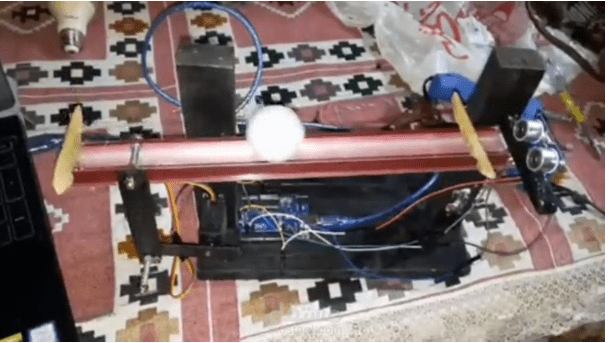
يحتوي هذا المشروع على متحكم اردوينو به pid كتقنية تحكم مغلقة (closed loop ) لقيوم بتقييم الوضع في ال plant ومن ثم حساب الخطأ في زوايا السيرفو موتور وبداية تحريك هذا السيرفو عن طريق الاردوينو لاتخاذ قرار بمقدار الحركة وتكرار هذة العملية حتى تتوازن الكرة في الموضع المحدد مسبقا في الكود البرمجي