Obstacle Avoidance
تفاصيل العمل
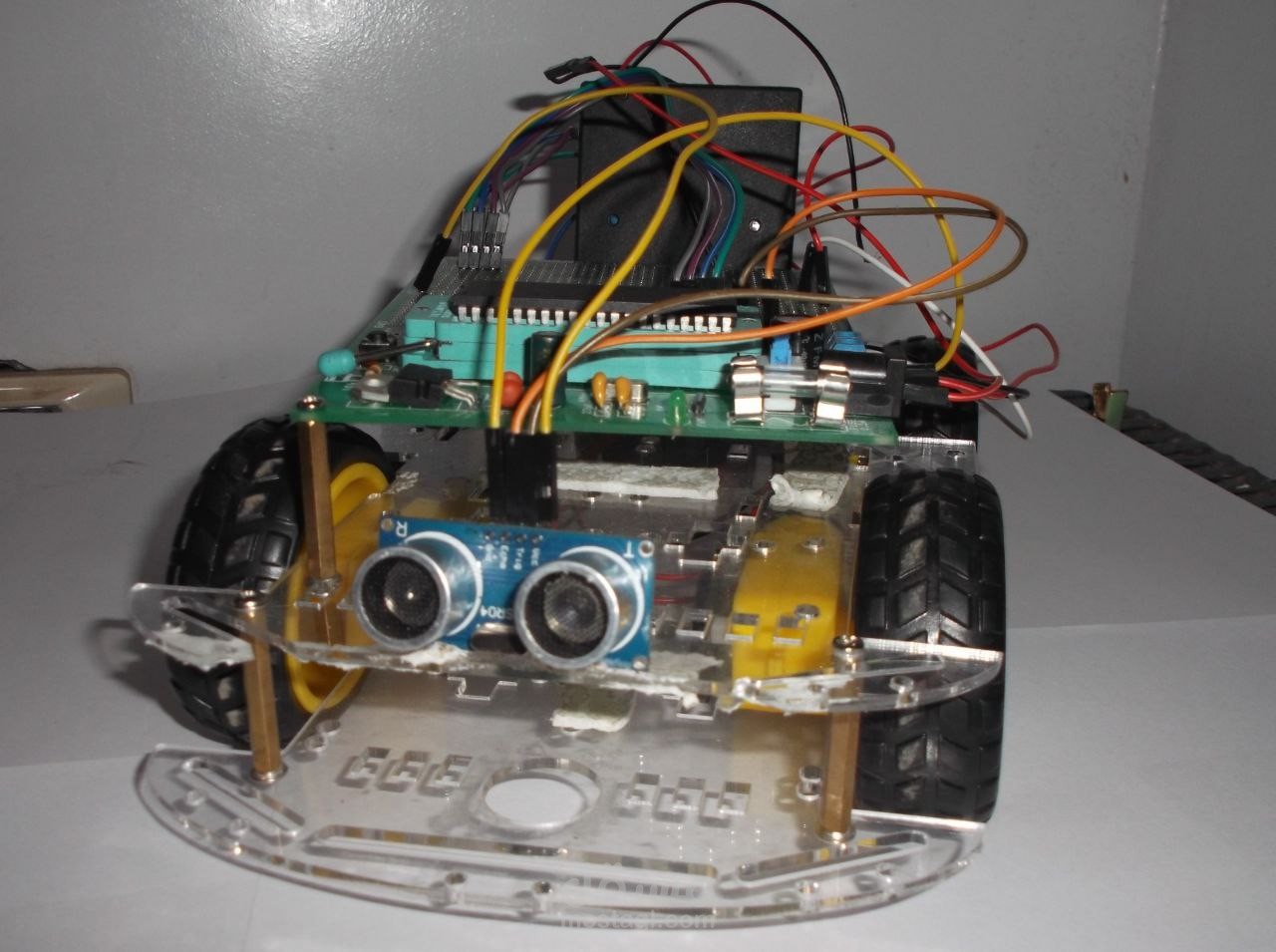
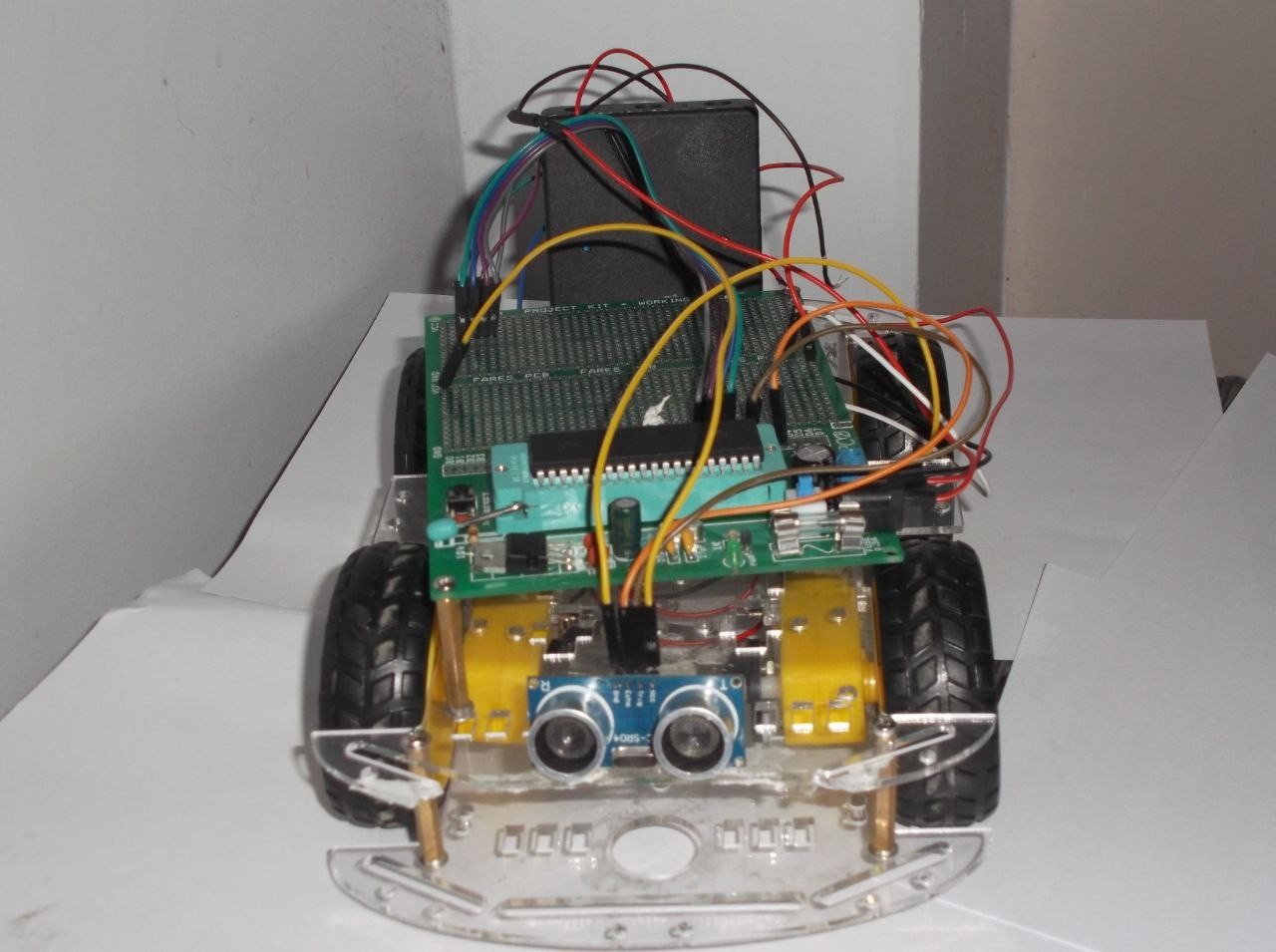
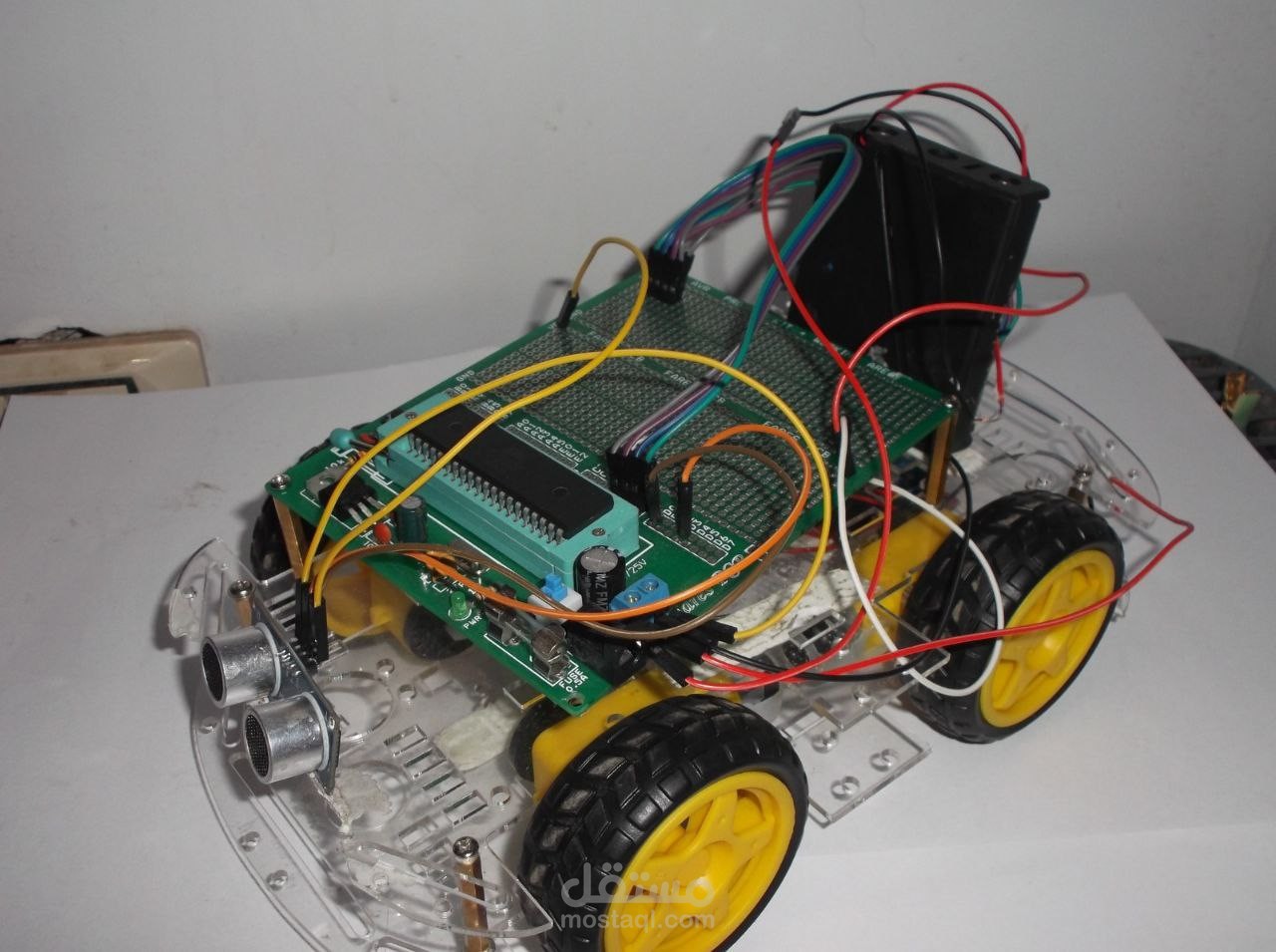
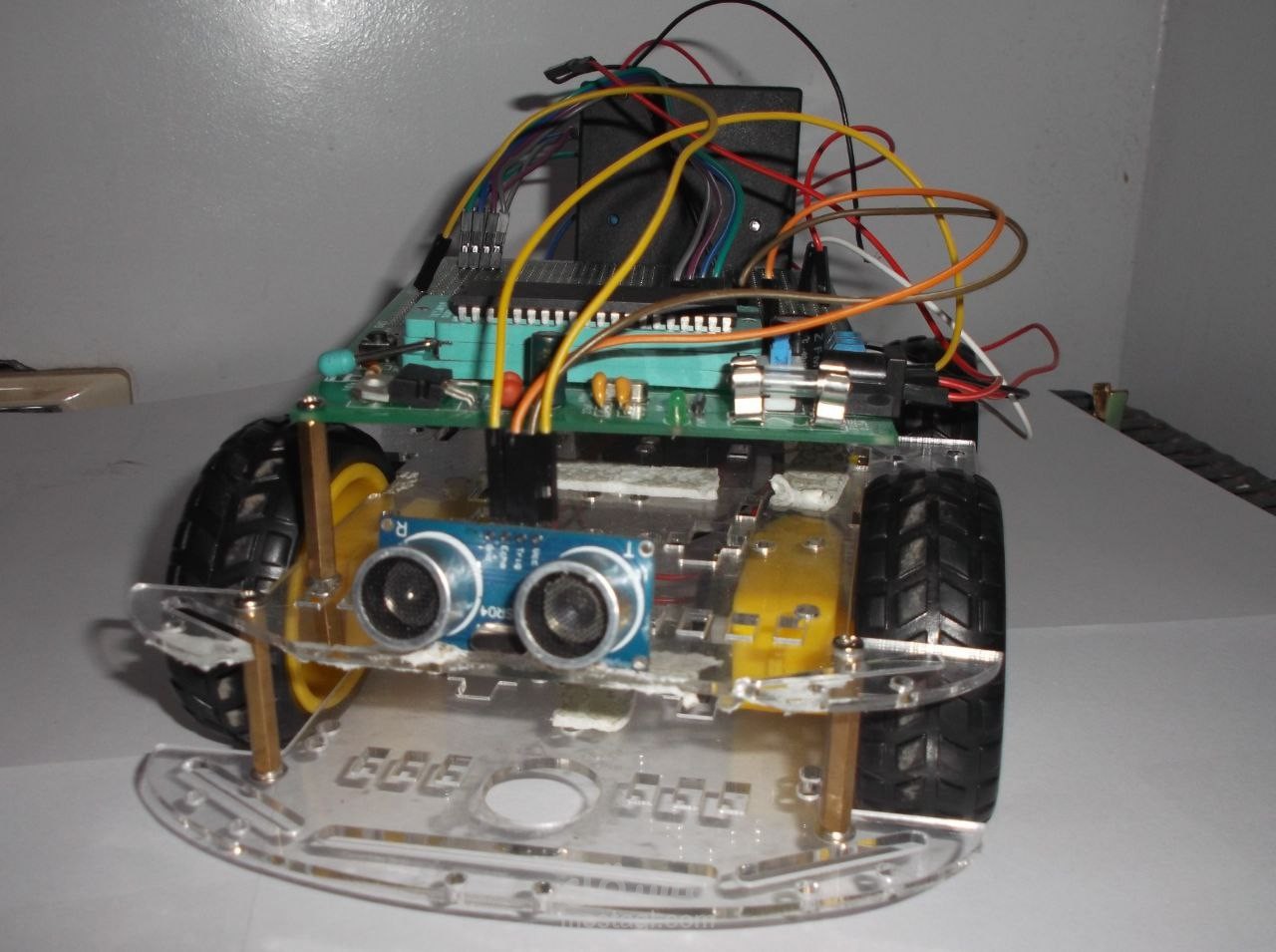
هذا الروبوت يقيس المسافة عن طريق الالتراسونيك ومن ثم بتخذ قرار اذا كان المكان امامه غير مغلق سيسير فيه واذا كان هنالك عوائق سيتخذ قرار بالالتفاف يمنة ويسرة ويختار الطريق الخالي من العوائق ويسير فيه تم استخدام atmega32 في التحكم في هذا الروبوت ويتم قياس المسافة عن طريق ارسال الاشارات من الالتراسونيك للمتحكم لاتخاذ قرار حيال هذة البيانات