Advanced Humanoid Robotic Arm with Simulink Simulation, Fuzzy Logic Control, and 3D Printing
تفاصيل العمل
يسرني أن أقدم مشروع ذراع روبوتي بشكل بشري متقدم يجمع بين المحاكاة البرمجية، وتقنيات التحكم المتقدمة، يعد هذا المشروع نتيجة خبرتي في تصميم SolidWorks، ومحاكاة MATLAB باستخدام إضافة SimScape، وطباعة الثلاثية الأبعاد، وبرمجة Arduino.
الميزات الرئيسية:
محاكاة Simulink:
باستخدام تصميم SolidWorks، قمت بمحاكاة دقيقة للذراع الروبوتية باستخدام إضافة SimScape على MATLAB. هذه المحاكاة المتقدمة سمحت بتحليل شامل لديناميات الذراع وأدائه قبل الانتقال إلى النموذج الفعلي.
تحكم Fuzzy Logic Control:
مزودة بتحكم منطقي غامض حديث يوفر تحكمًا ذكيًا وتكيفيًا. تضمن هذه التقنية حركات دقيقة وسلسة، مما يجعل الذراع متعدد الاستخدامات لتطبيقات متنوعة.
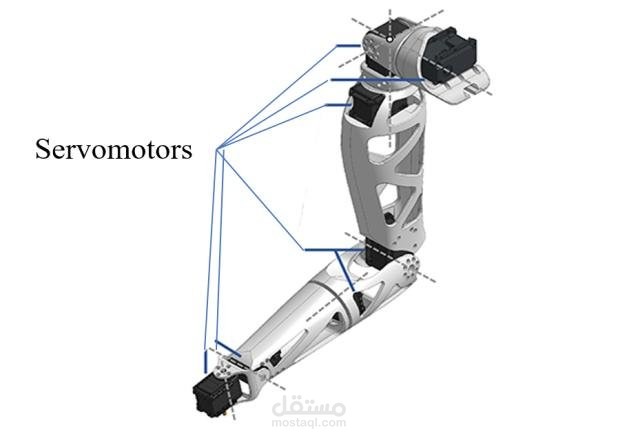
تنفيذ الأجهزة:
قمت بتحويل التصميم المحاكاة إلى نموذج عملي في العالم الحقيقي باستخدام أجزاء مطبوعة بتقنية الطباعة ثلاثية الأبعاد بعناية، مما يضمن المتانة والدقة في الحركة.
إمداد الطاقة:
تعتمد الذراع الروبوتية على إمداد طاقة موثوق وفعّال، مما يضمن أداءً مثلى أثناء العمل الممتد.
تكامل Arduino:
يتم دمج وحدة التحكم Arduino بسهولة في النظام، حيث تعمل كدماغة للذراع الروبوتية. وهذا يسهل التحكم في الوقت الحقيقي ويفتح أفقًا للتخصيص والتوسيع الإضافي.
لا تفوت الفرصة لاستخدام هذه التكنولوجيا الحديثة في مشاريعك. اتصل بي لمناقشة كيف يمكن لهذه التقنية أن ترفع مشاري