تصميم ذراع روبوتية 6 DOF
تفاصيل العمل
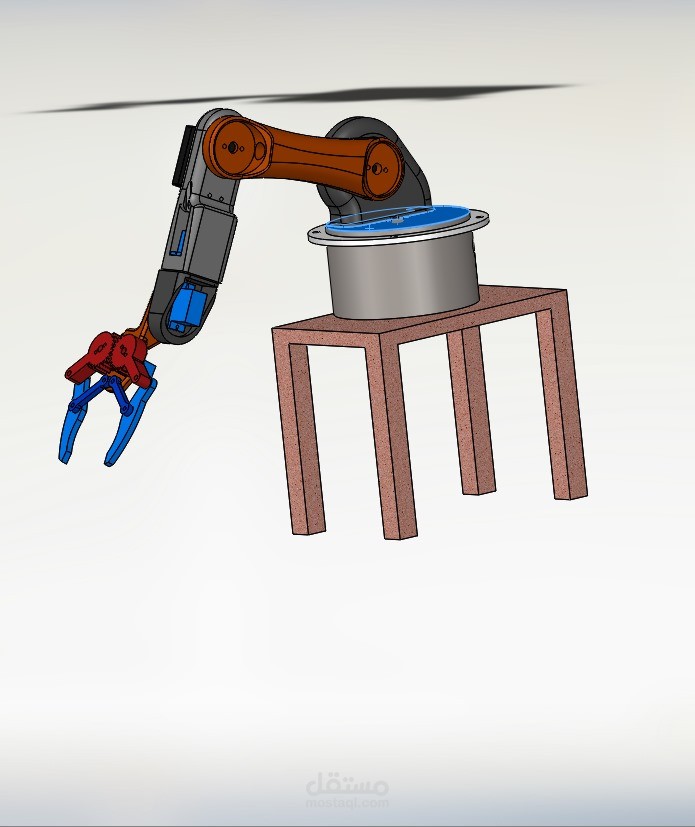
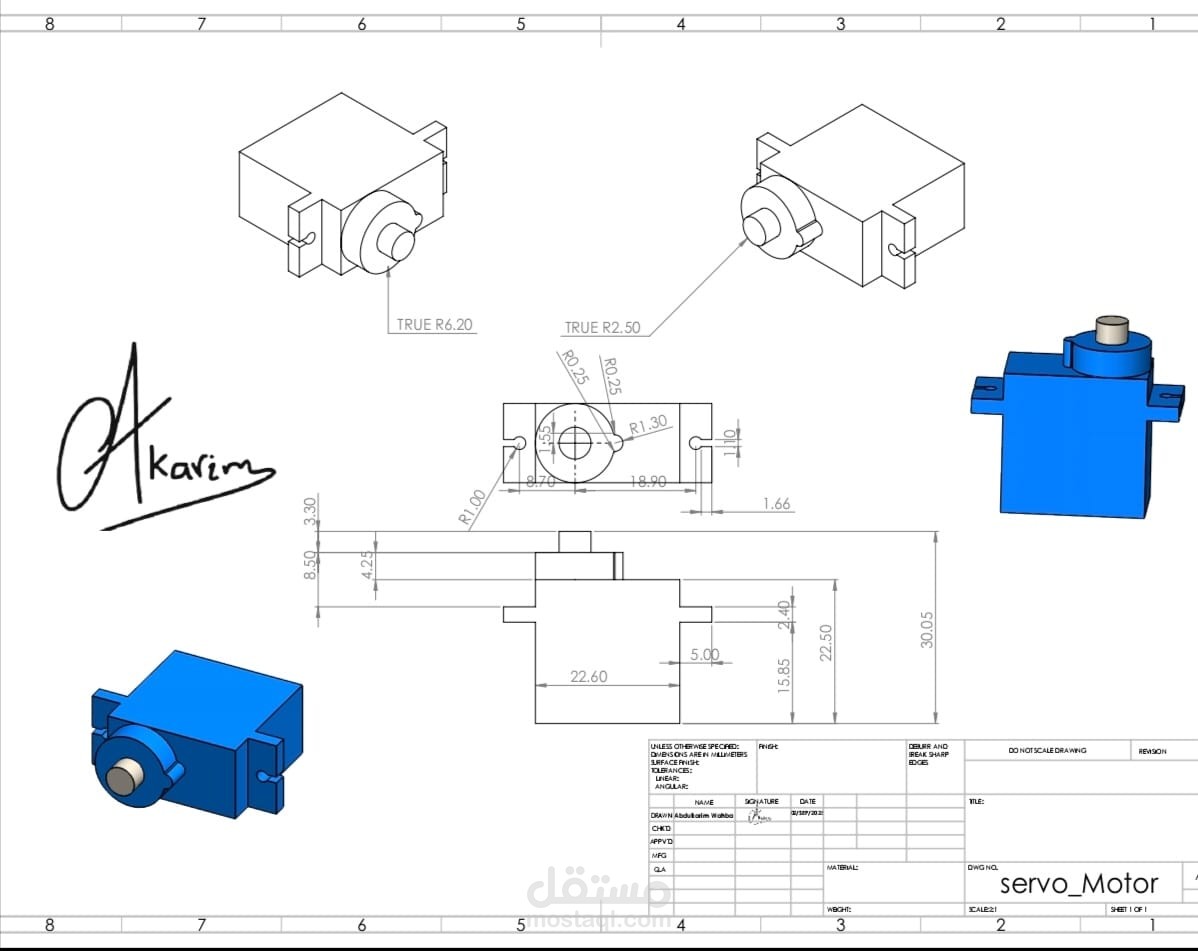
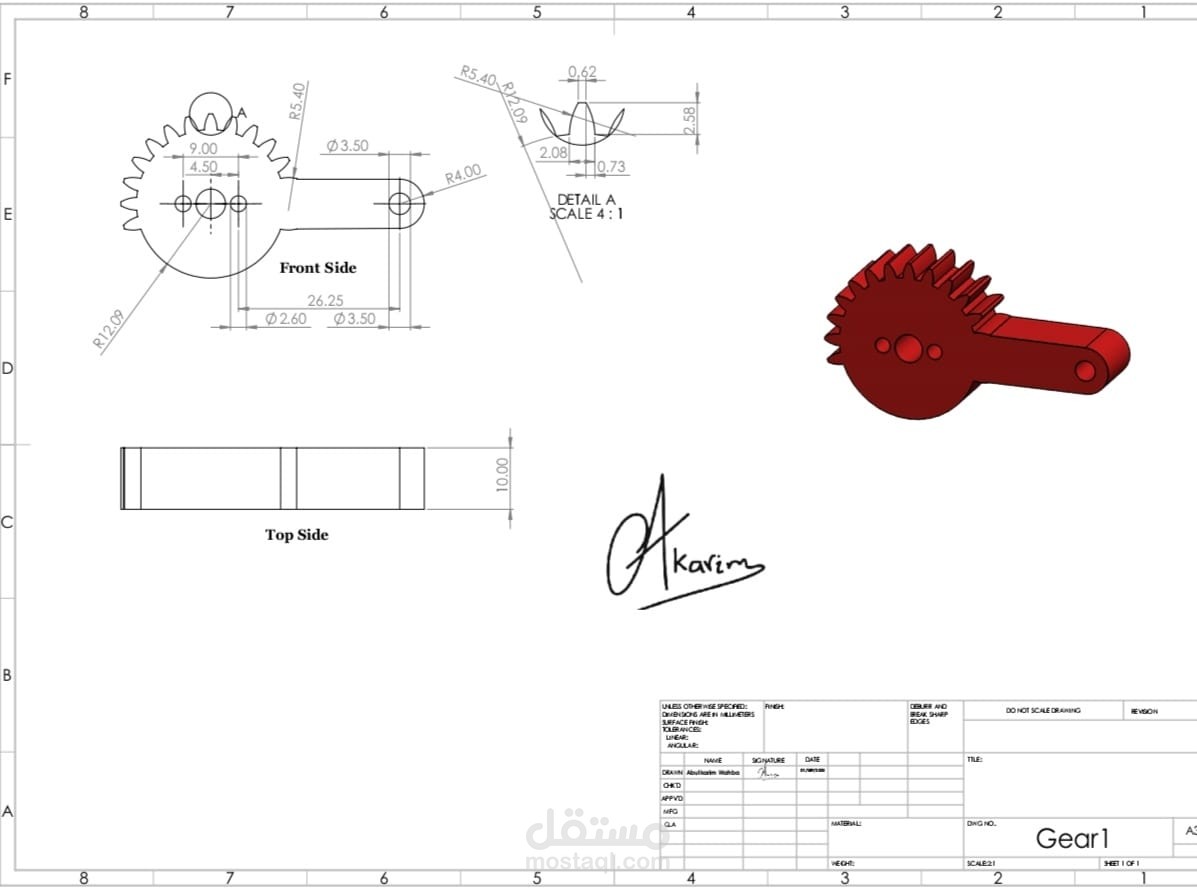
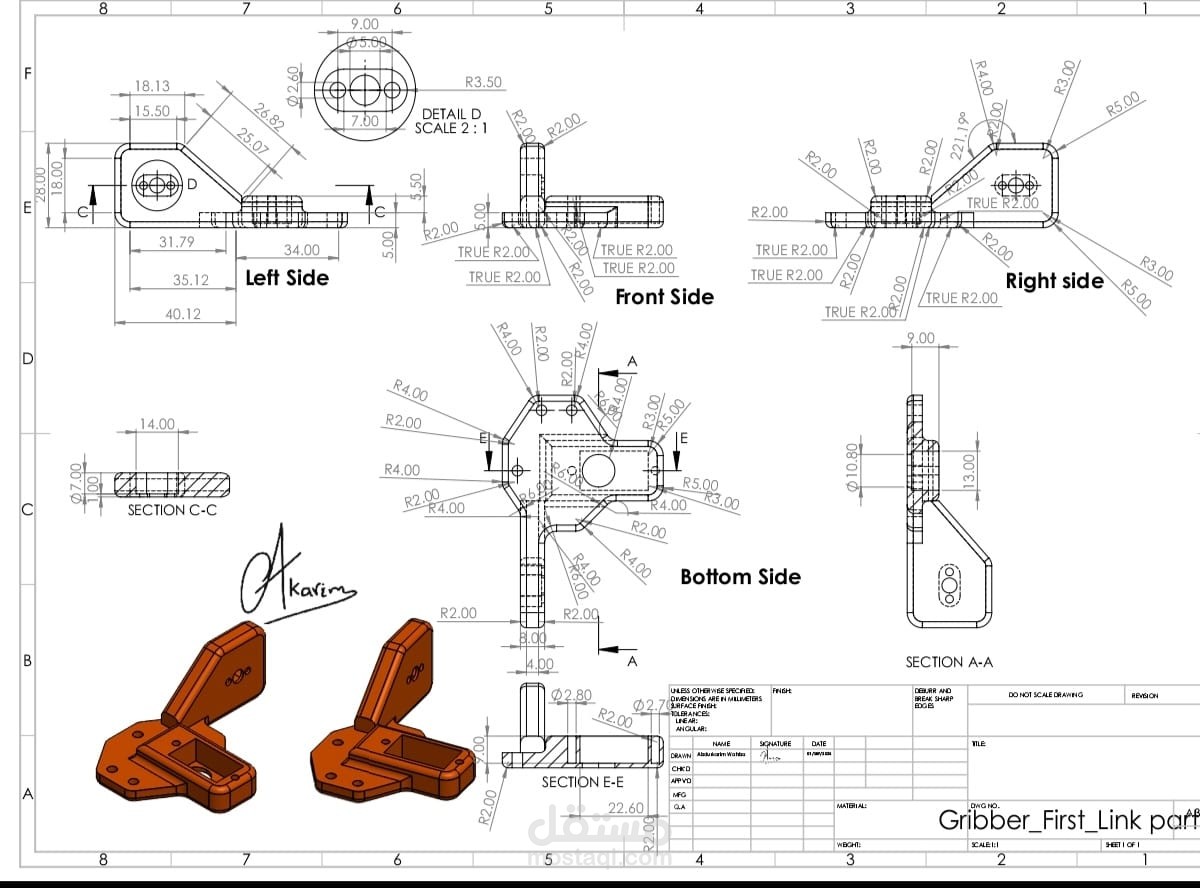
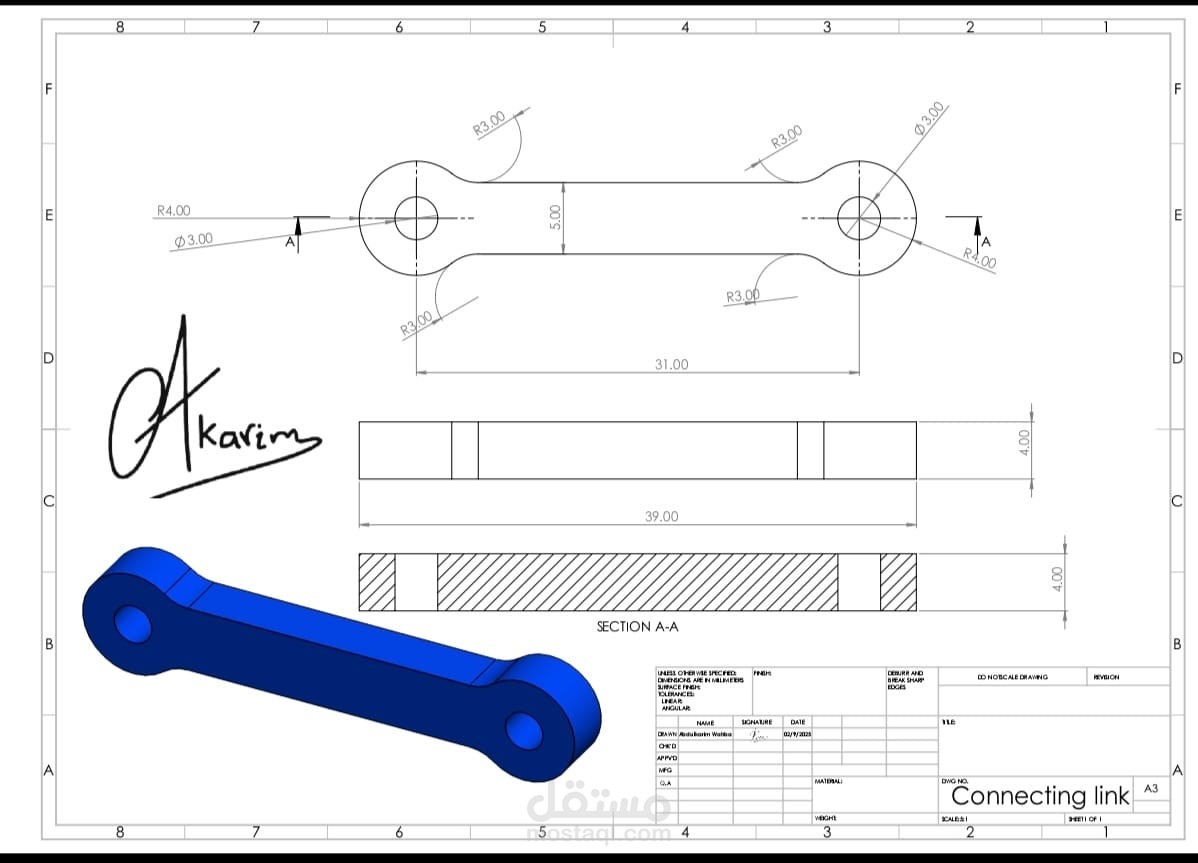
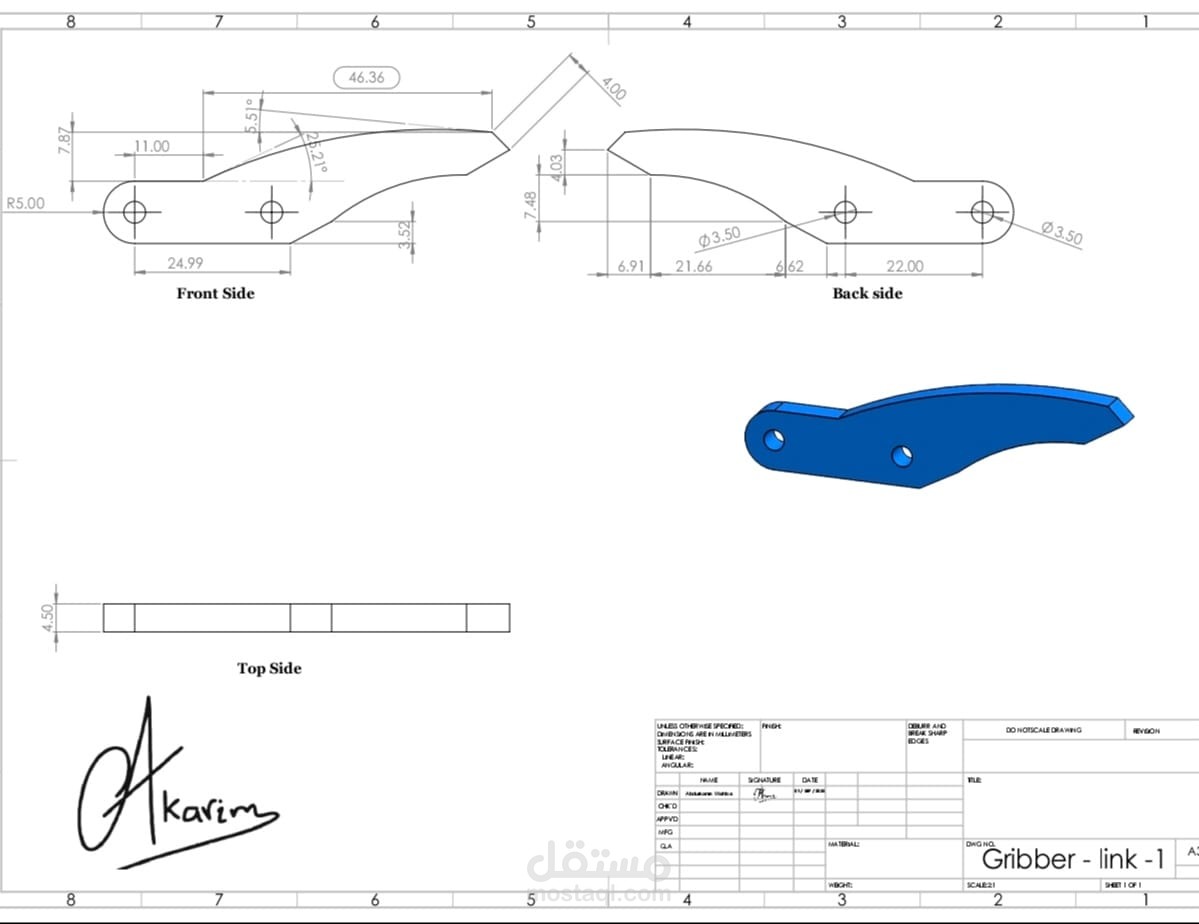
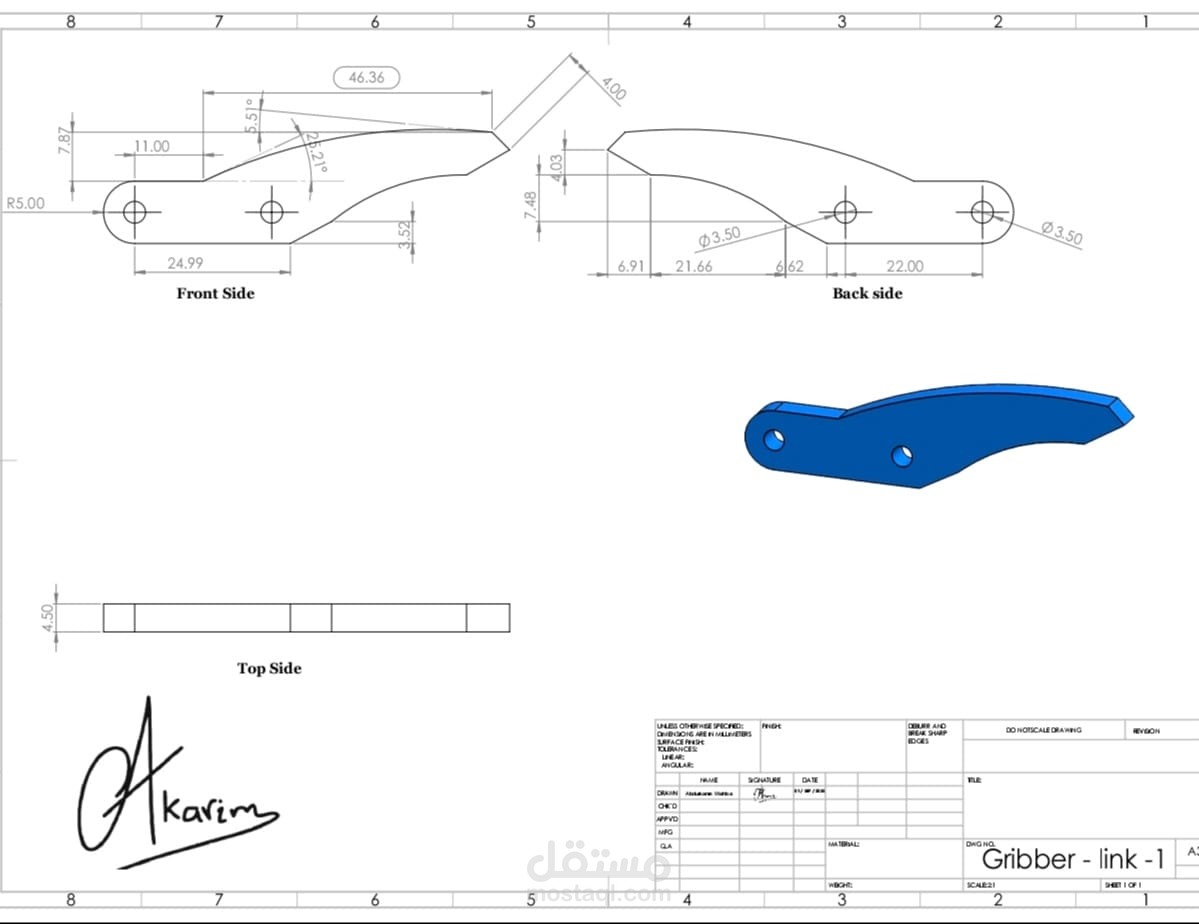
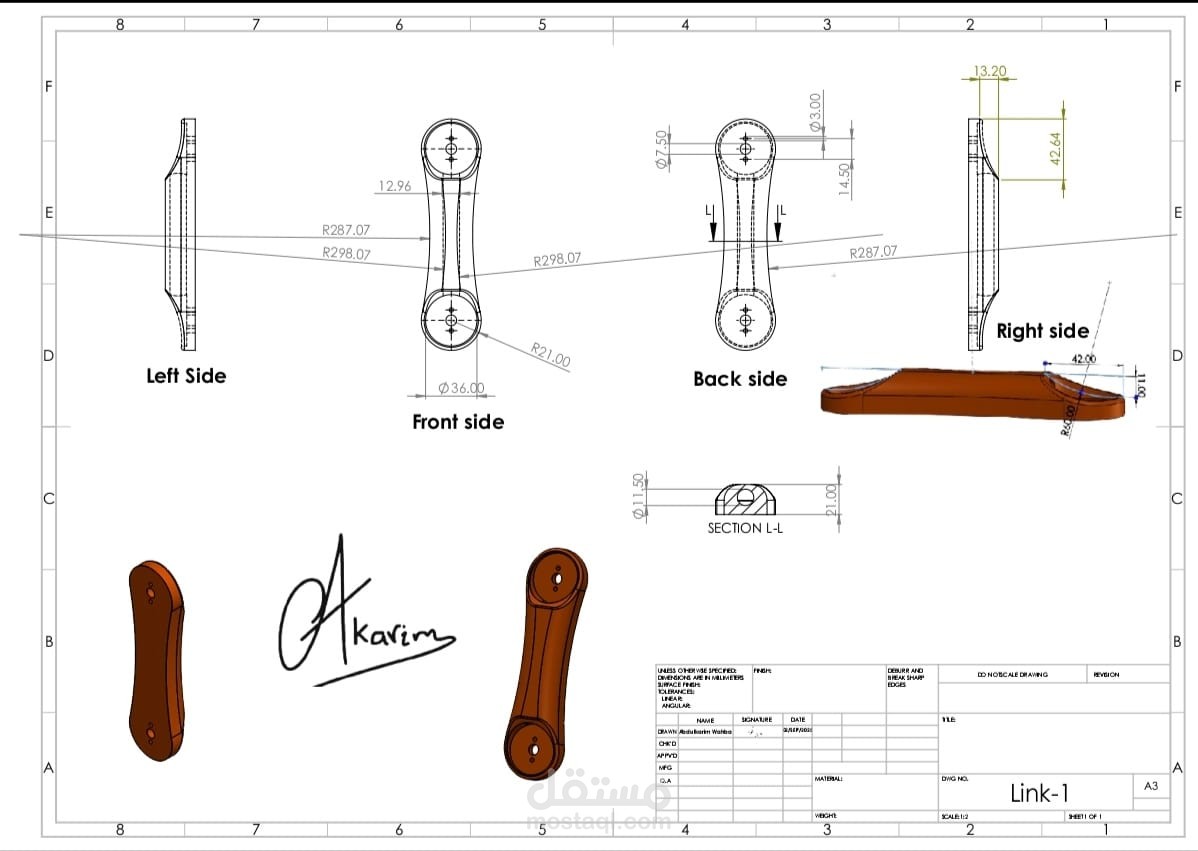
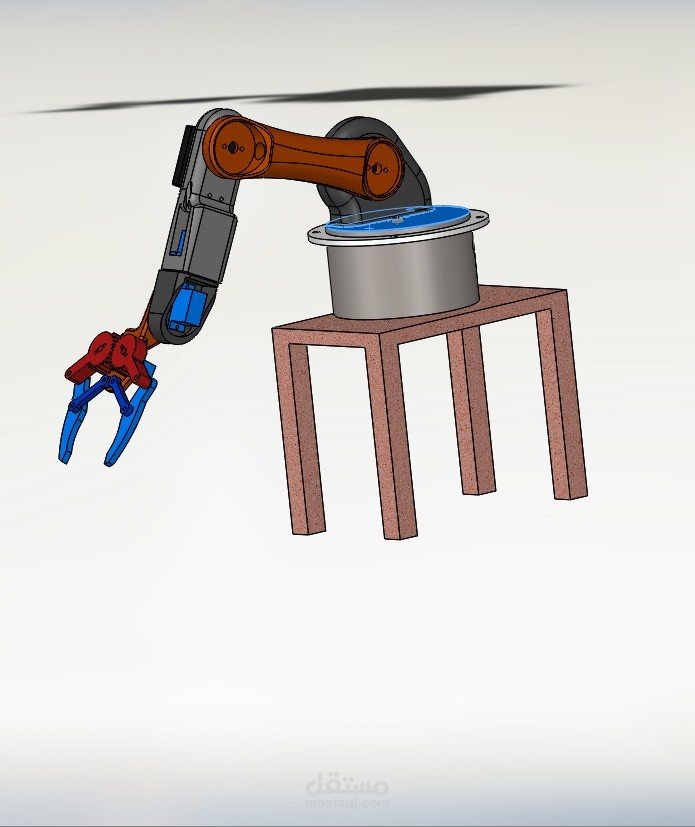
تم تصميم ذراع روبوتية ذو ست درجات حرية باستعمال برنامج SolidWorks