NASA Mars Sample & Return Rover
تفاصيل العمل
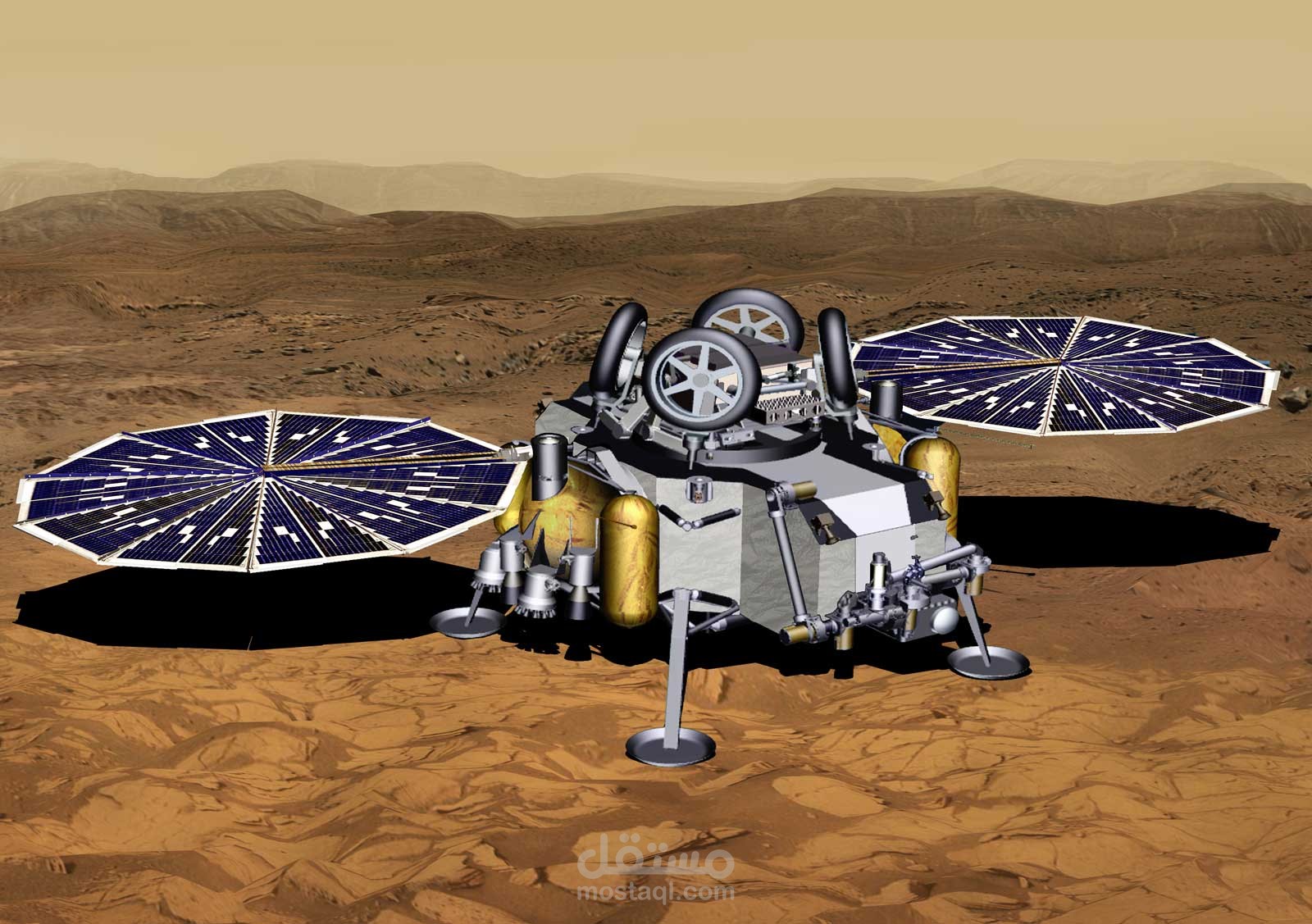
NASA Mars Sample & Return Rover:I programed a self-driving car with robotic arm to locate the rocks on mars and then collects it by using simulator on Linux with fidelity 95%.
NASA Mars Sample & Return Rover:I programed a self-driving car with robotic arm to locate the rocks on mars and then collects it by using simulator on Linux with fidelity 95%.