Arduino diagram with code
تفاصيل العمل
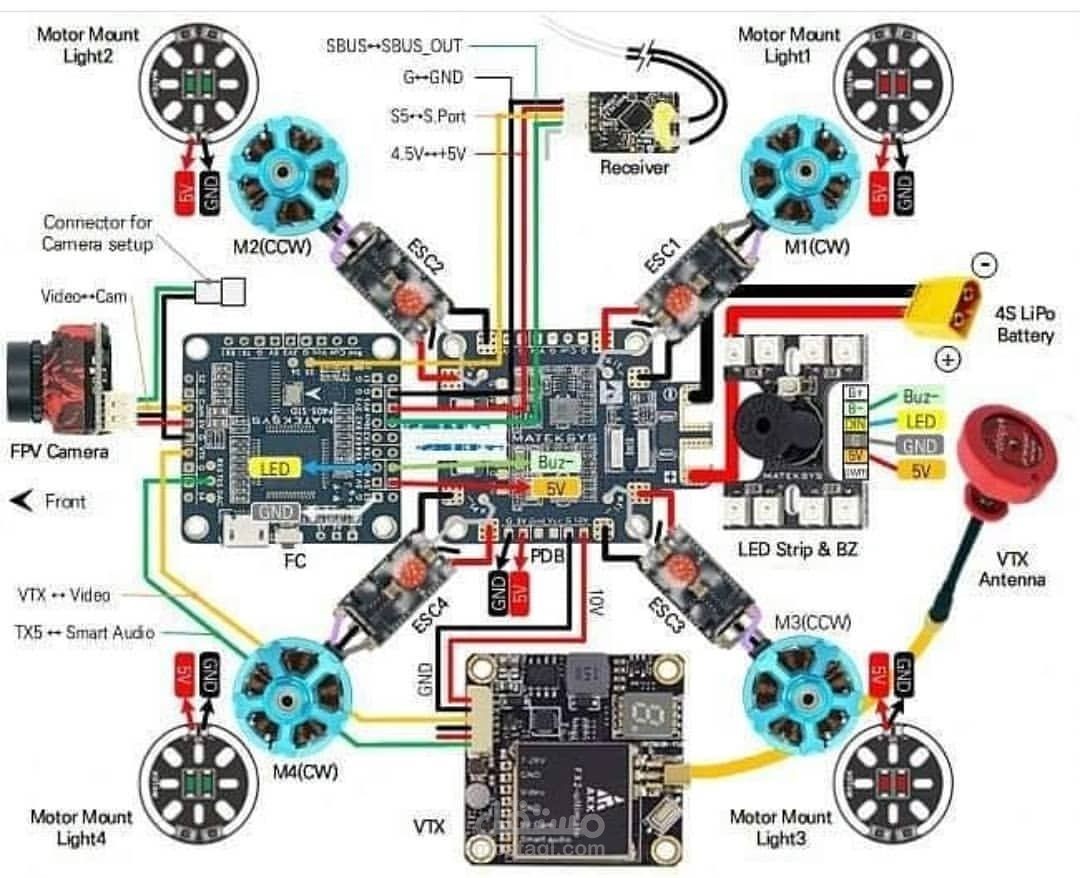
تم رسم الدائرة البيانية لنظام التحكم بالطائرة بدون طيار باستخدام Arduino والذي يستخدم أيضًا نظام FPV (First Person View). يحتوي النظام على مجموعة من الأجهزة المتصلة بشكل مباشر بوحدة Arduino الرئيسية وهي:
محركات الطائرة: يتم توصيل 4 محركات بوحدة Arduino باستخدام ESCs (Electronic Speed Controllers) والتي تقوم بتحويل الإشارة الرقمية الصادرة من Arduino إلى إشارة تحكم في سرعة المحركات.
بوصلة: يتم استخدام بوصلة لتوفير الاتجاه الحالي للطائرة، حيث يتم تحويل الإشارة الرقمية الخاصة بها إلى قيمة زاوية ويتم استخدام هذه الزاوية في تحديد الاتجاه الحالي للطائرة.
مستشعر التسارع والجاذبية: يتم استخدام هذا المستشعر لقياس حركة الطائرة والتحكم فيها، حيث يتم قياس الحركة على ثلاث محاور X و Y و Z وتستخدم الإشارات الرقمية الصادرة من المستشعر في تحديد موقف الطائرة وتحديد الاتجاه المناسب للحركة.