The self-balance robot project
تفاصيل العمل

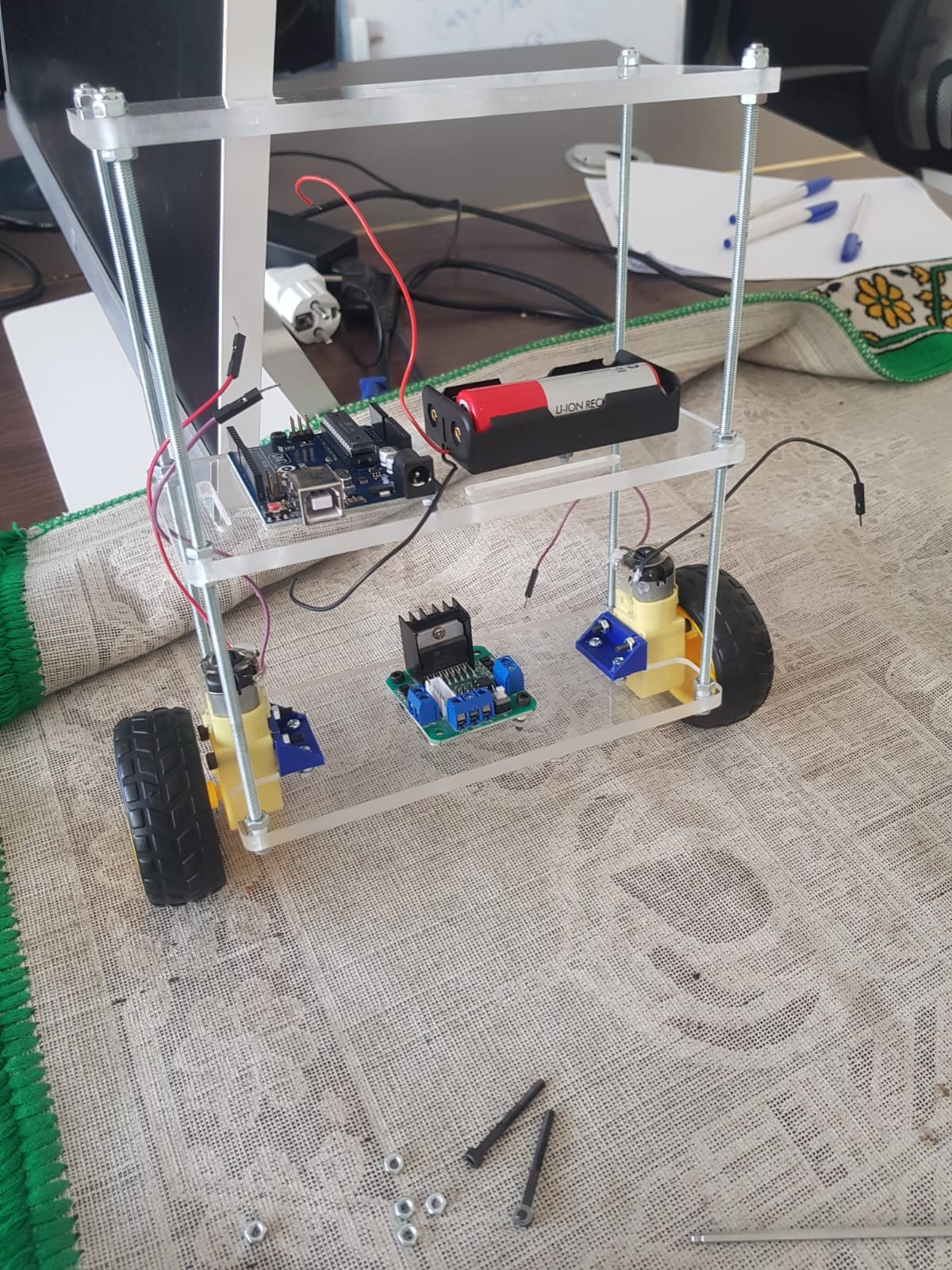
يتضمن مشروع الروبوت التوازن الذاتي استخدام Arduino ومستشعر MPU6050 لبناء روبوت يمكنه توازن نفسه على عجلتين. يستخدم الروبوت خوارزمية التحكم PID للحفاظ على توازنه ، ويوفر مستشعر MPU6050 إدخالًا لـ Arduino لموضع الروبوت. يتطلب المشروع بناء الروبوت الفعلي وبرمجة Arduino للتحكم في المحركات وخوارزمية التحكم PID.
المهارات المطلوبة:
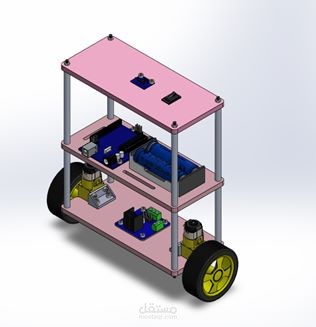
النمذجة: القدرة على تصميم وإنشاء نموذج فعلي للروبوت باستخدام برامج النمذجة الثلاثية الأبعاد مثل SolidWorks أو Fusion 360.
التحكم: يجب أن يكون لديك معرفة بأنظمة التحكم ، بما في ذلك متحكمات PID ، لتنفيذ خوارزمية التحكم في الذاتي.
البرمجة: يجب أن يكون لديك إتقان للبرمجة بلغة C++ ومعرفة ببرمجة Arduino للتحكم في المحركات وخوارزمية التحكم PID.
الهندسة الكهربائية: يجب أن يكون لديك معرفة بالهندسة الكهربائية لتوصيل المحركات والمستشعرات وغيرها من مكونات الروبوت.
الروبوتيات: الخبرة في الروبوتيات ومعرفة بحركية الروبوت ضرورية لتصميم هيكل الروبوت وفهم سلوكه.
مشروع الروبوت التوازن الذاتي هو مشروع صعب يتطلب مزيجًا من المهارات في النمذجة والتحكم والبرمجة. إنه فرصة ممتازة لأولئك المهتمين بالروبوتيات وأنظمة التحكم لتطبيق مهاراتهم ومعرفتهم لبناء روبوت مثير ومفيد.