3DOF Serial Robot
تفاصيل العمل
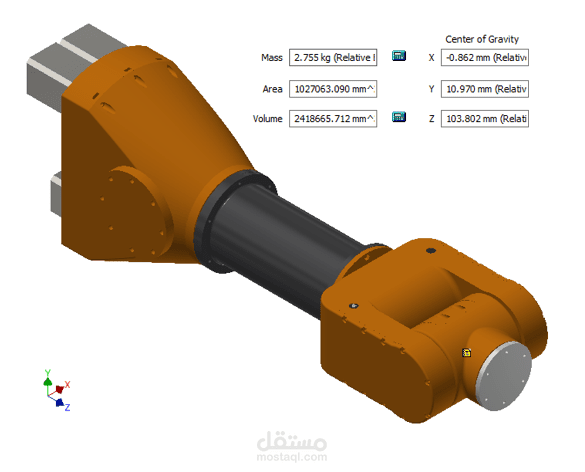
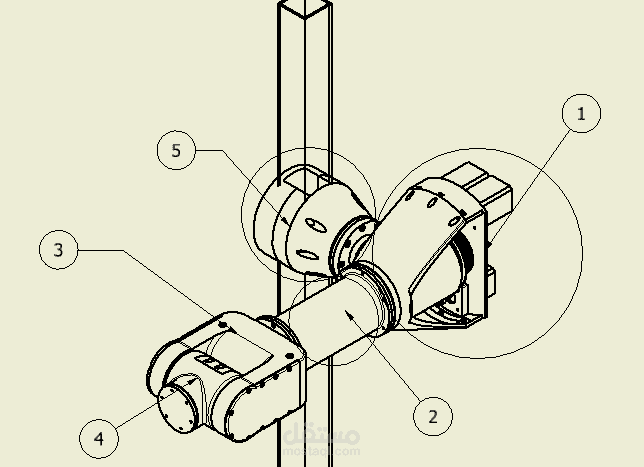
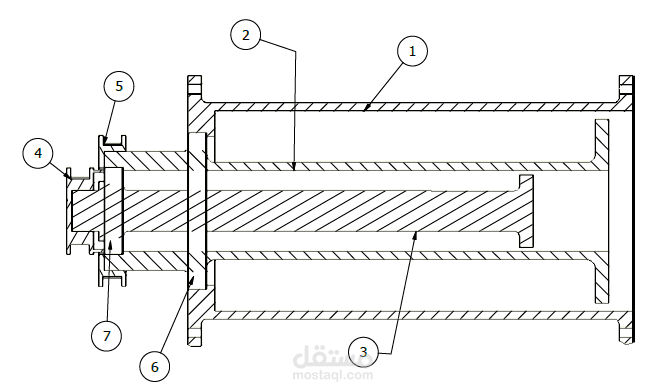
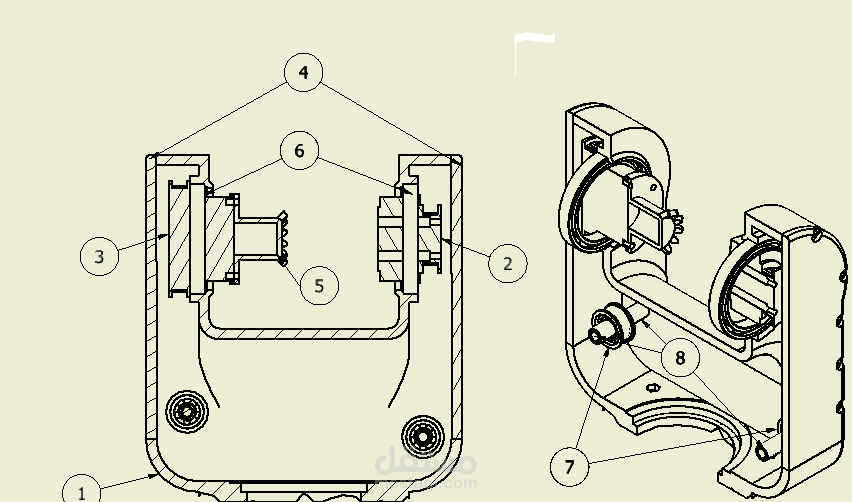
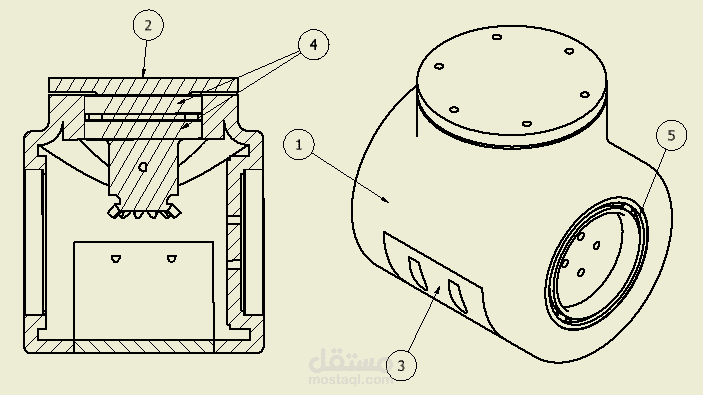
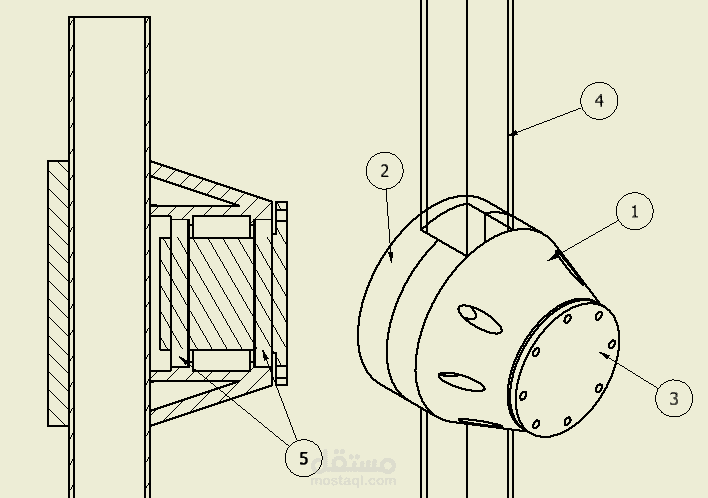
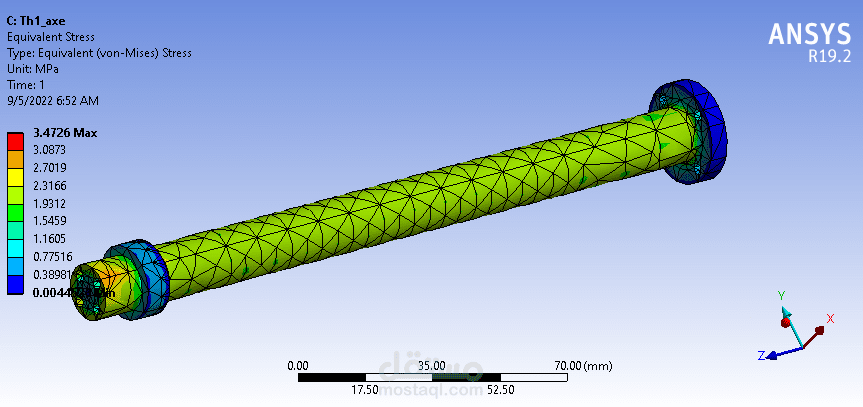
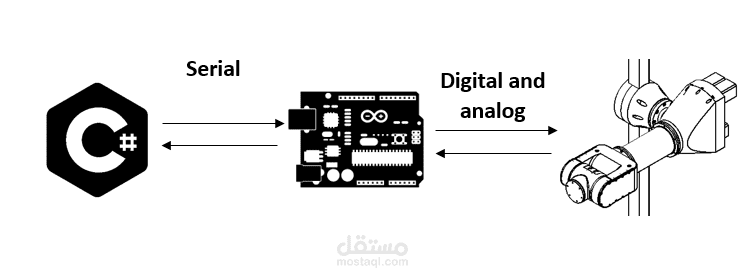
يهدف المشروع إلى دراسة تصميم وتنفيذ نموذج مصغر لروبوت تسلسلي بثلاث درجات حرية دورانية كمفصل الرسغ في الأذرع الروبوتية الصناعية ذات الدرجات الحرية الستة KUKA وذلك بخلوص ميكانيكي أصغري ومردود نقل استطاعة عال، حيث سيتم توضيع المحركات الثلاثة في الخلف (بداية الذراع الثانية) وتفعيل الروابط التسلسلية بطريقة غير مباشرة عن طريق ربط المحركات مع أنظمة سيور وبكرات مخددة متسلسلة لضمان نقل الحركة للمحور المطلوب. يضمن هذا التموضع جعل مركز عطالة الذراع الثانية للروبوت الصناعي ينطبق تقريبا على محور دوران الرابطة الثالثة وهو ما ينعكس إيجابا على النموذج الديناميكي للذراع ككل. يهدف المشروع أيضا إلى التحكم بموضع وسرعة الروابط الثلاثة بالحلقة المفتوحة والتحقق من أداء النموذج.