المقارنة بين خوارزميات التحكم لتعليق كرة في نفق هوائي
تفاصيل العمل
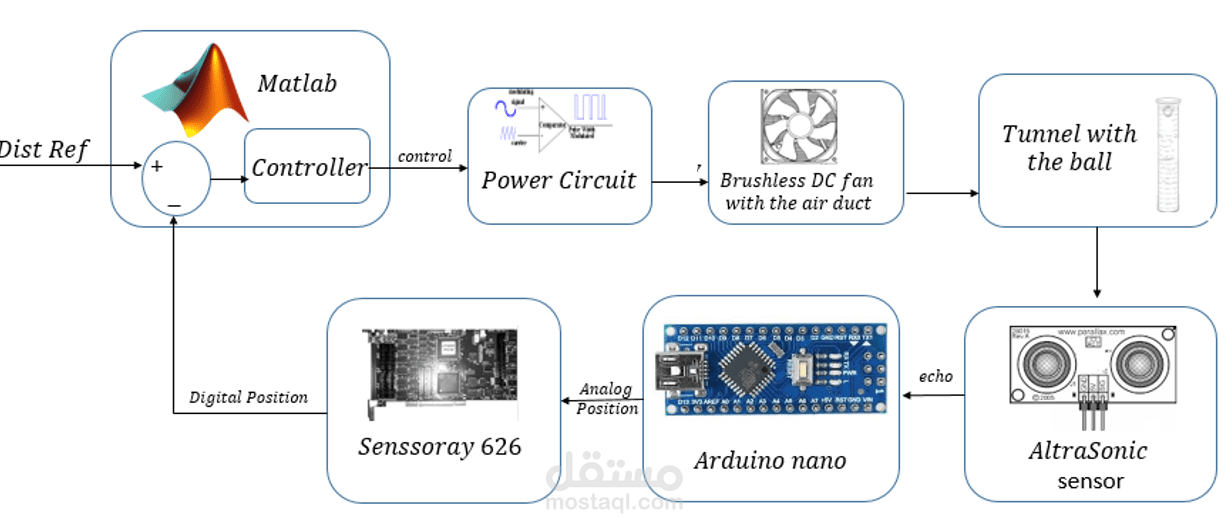
في هذا المشروع لدينا نظامين على التسلسل
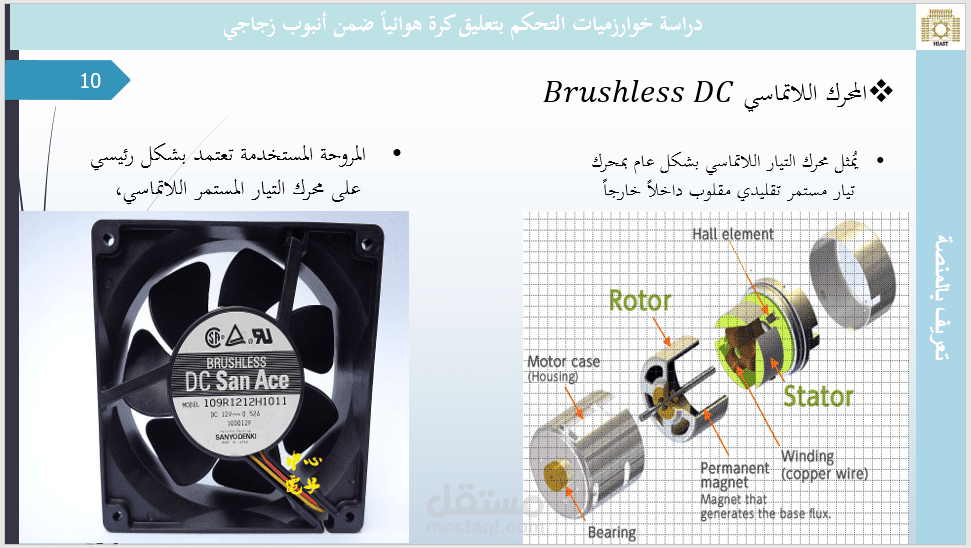
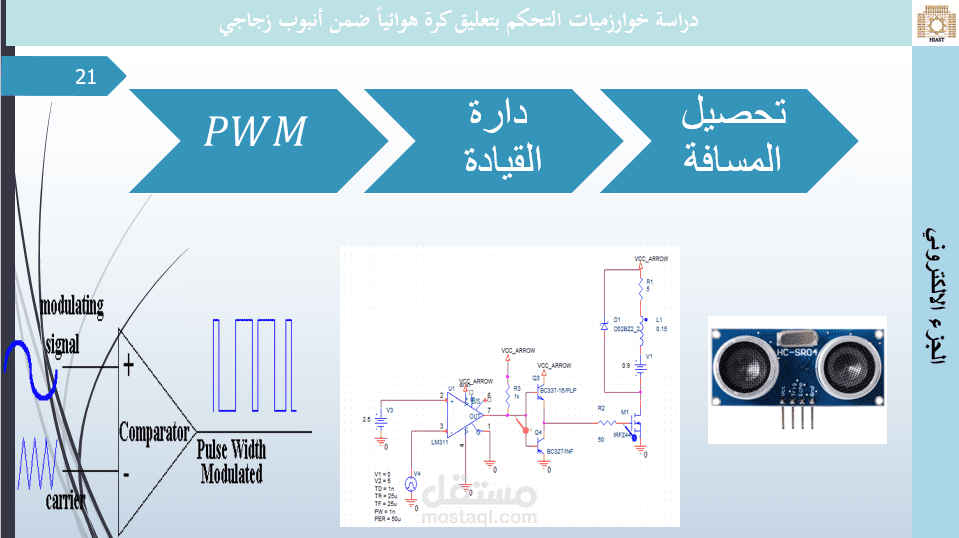
النظام الأول وهو نظام محرك التيار المستمر المعرف بدخل وخرج كالتالي ، دخله جهد يقاس بالفولط وخرجه سرعة تقاس بعدد الدورات في الدقيقة
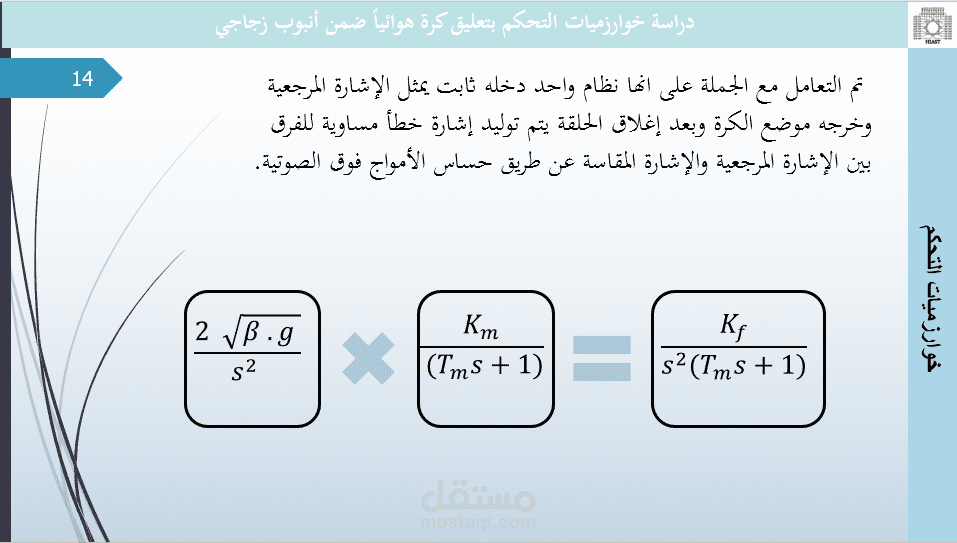
النظام الثاني هو نظام الكرة والذي دخله سرعة المروحة وخرجه موضع الكرة
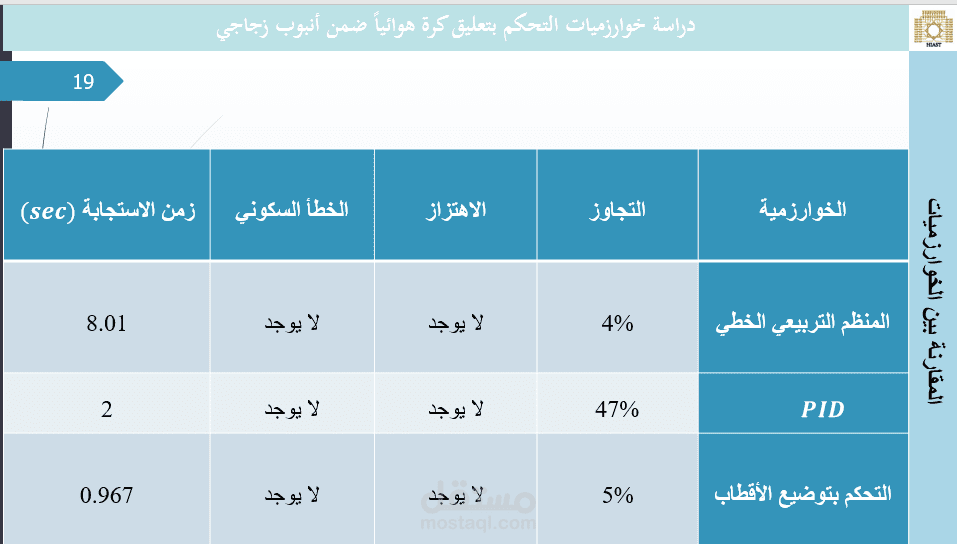
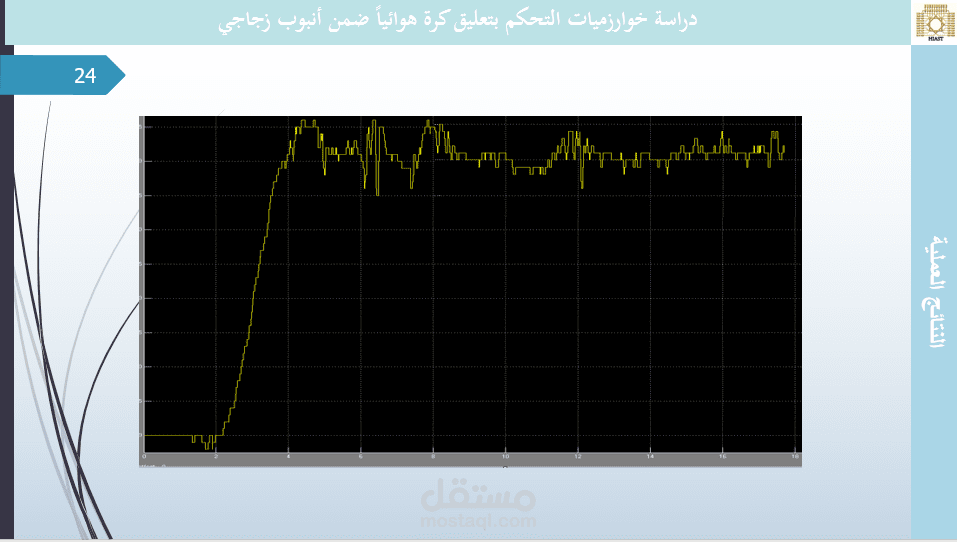
تمت التحكم بموضع الكرة باستخدام ثلاث خوارزميات
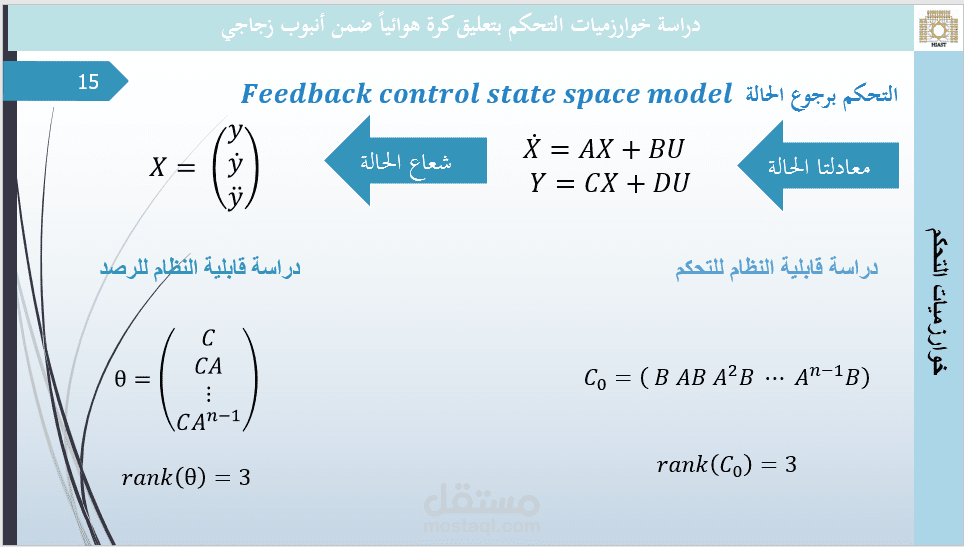
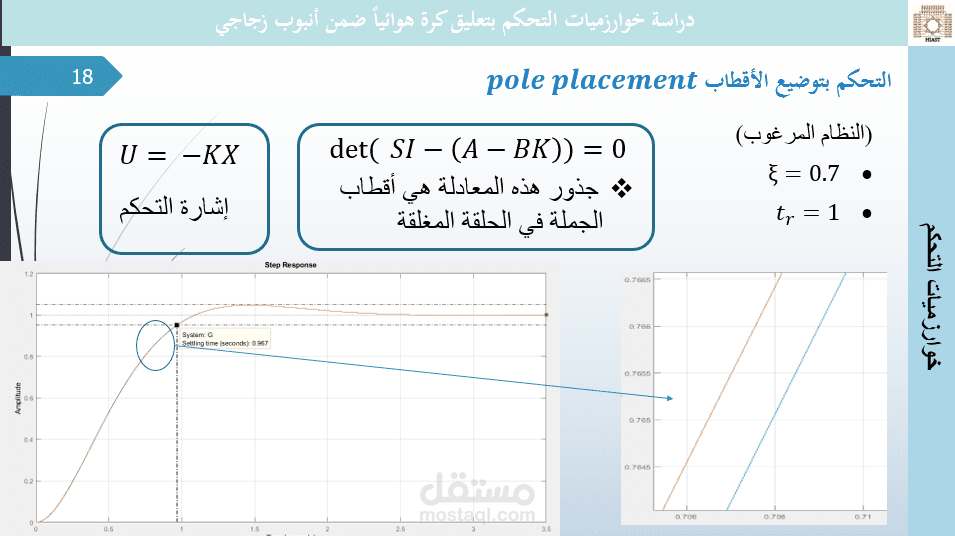
الخوارزمية الأولى: هي خوارزمية من نوع feedback control state space model وتدعى Pole placement
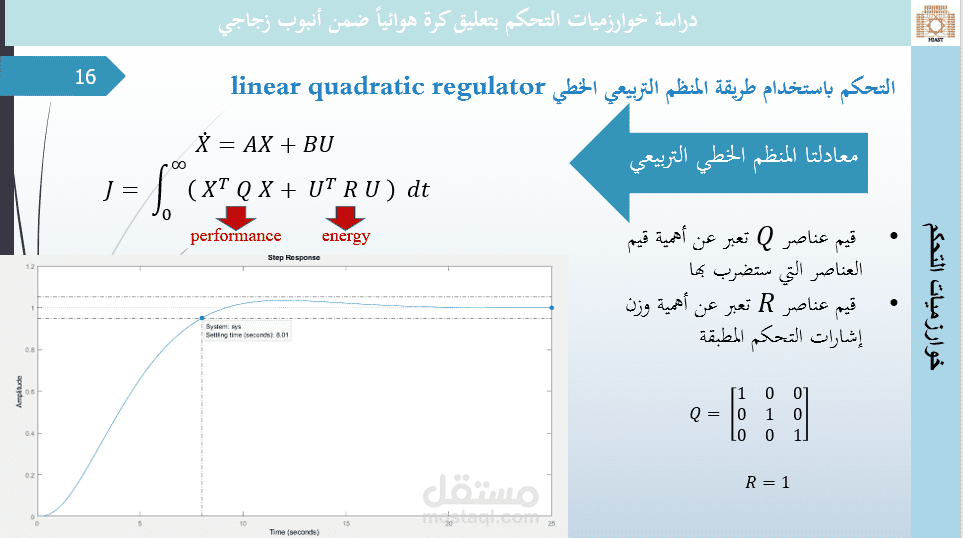
الخوارزمية الثانية: هي خوارزمية من الخوارزميات التي تحوي على تابع كلفة يجب تصغيره قدر الامكان وتدعى التحكم باستخدام طريقة المنظم التربيعي الخطي linear quadratic regulator
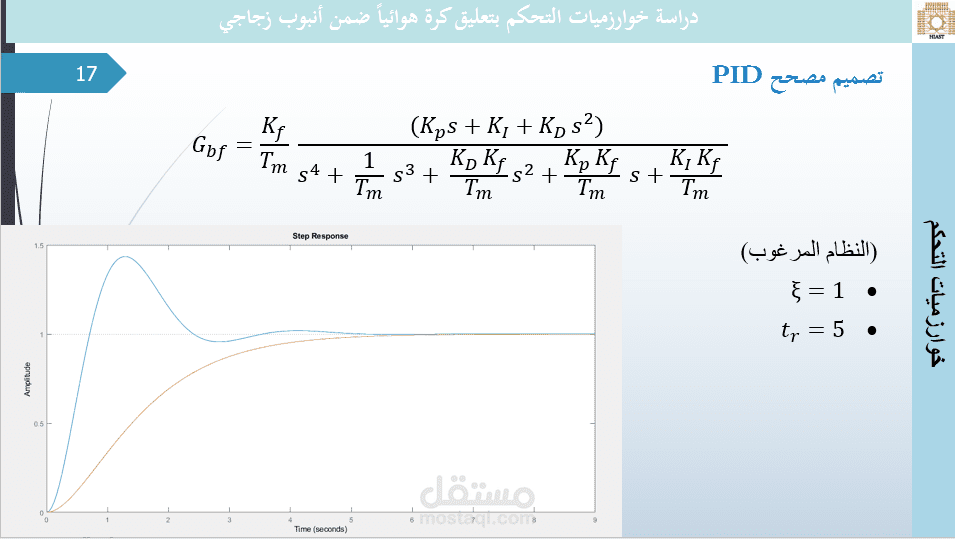
الخوارزمية الثالة : وهي من أشهر خوارزميات التحكم والتي هي PID controller